カメラ画像信号・情報処理
背景
近年、ドローンの普及に伴い、安全な飛行のための自己位置推定技術が注目されています。
一般に自己位置推定にはGNSSが用いられますが,衛星信号の受信状況によっては正確な位置推定が行えない場合があります。
そこで本研究では、ドローンで取得した空撮画像とGoogleマップ等の空撮画像データベースをマッチングすることで、GNSSに依存しない自己位置推定手法について研究しています。

図 実際のドローンによる空撮の様子
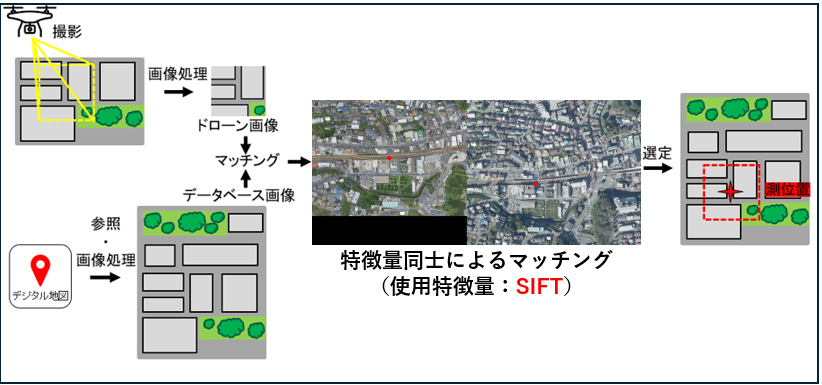
図 画像マッチングの流れ
研究内容
【画像マッチングによる自己位置推定】
本研究では、画像マッチングを用いた自己位置推定手法を研究しています。
具体的には、テンプレートマッチングと特徴量マッチングの2手法を用いています。
テンプレートマッチングは画像全体の類似度を用いるため季節変化に強いです。
特徴量マッチングは特徴点の対応付けを行うため画像の向きや縮尺の違いに対してロバストであるという特徴があります。

図 シフトマッチングの結果

図 テンプレートマッチングの結果
研究内容
【追尾フィルタによる観測値補正】
画像マッチングの結果には誤差が含まれるため、本研究では追尾フィルタを用いて観測値の補正を行っています。
追尾フィルタは、過去の観測結果から次の位置を予測し、予測値と観測値を組み合わせて平滑化することで、誤差を抑制する技術です。
画像マッチングを一定時間間隔で行い、得られた複数フレームの結果に対して追尾フィルタを適用します。
本研究では、カルマンフィルタとα-βフィルタの2種類の追尾フィルタを用いています。
カルマンフィルタは運動モデルなど複数のパラメータを設定して追尾を行う手法であり、設計や計算は複雑ですが、高精度な追尾が可能です。
α-βフィルタは位置と速度に対する重みづけパラメータのみを用いる比較的単純な手法であり、計算量や設計負担が小さい特徴があります。
ただし、等速直線運動以外の運動に対しては追尾精度が低下する場合があります。

図 カルマンフィルタによる追尾結果

図 αβフィルタによる追尾結果
<< 前のページに戻る
