低軌道衛星測位・信号処理
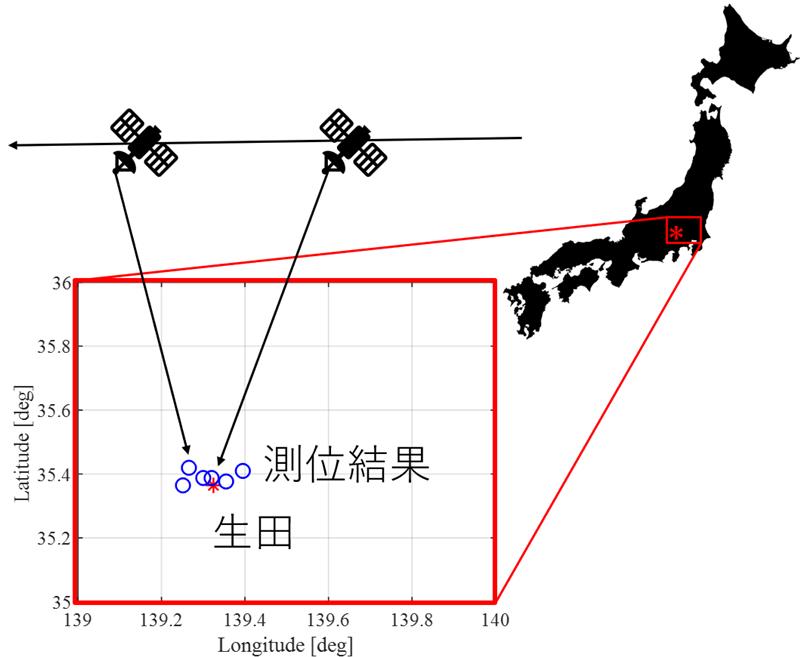
GPSは私たちの生活に欠かせない技術です。GPSは、衛星から送信される電波をカーナビやスマートフォンが受信することで位置を推定しています。しかし場合によっては位置情報が不安定になることがあります。本研究では、この問題を補うために別手法を用いた位置の推定方法について研究しています。

本研究室では、陸上から宇宙まで、さまざまな移動体の航法・センシングに関する研究を行っています。アプリケーションは、レーダ、画像、GNSS、追尾、検出、識別、航空、衛星、ドローン、船舶、自動車など、です。要素技術は信号処理や情報処理です。理論的な研究から実験まで幅広く行っています。
GPSは私たちの生活に欠かせない技術です。GPSは、衛星から送信される電波をカーナビやスマートフォンが受信することで位置を推定しています。しかし場合によっては位置情報が不安定になることがあります。本研究では、この問題を補うために別手法を用いた位置の推定方法について研究しています。
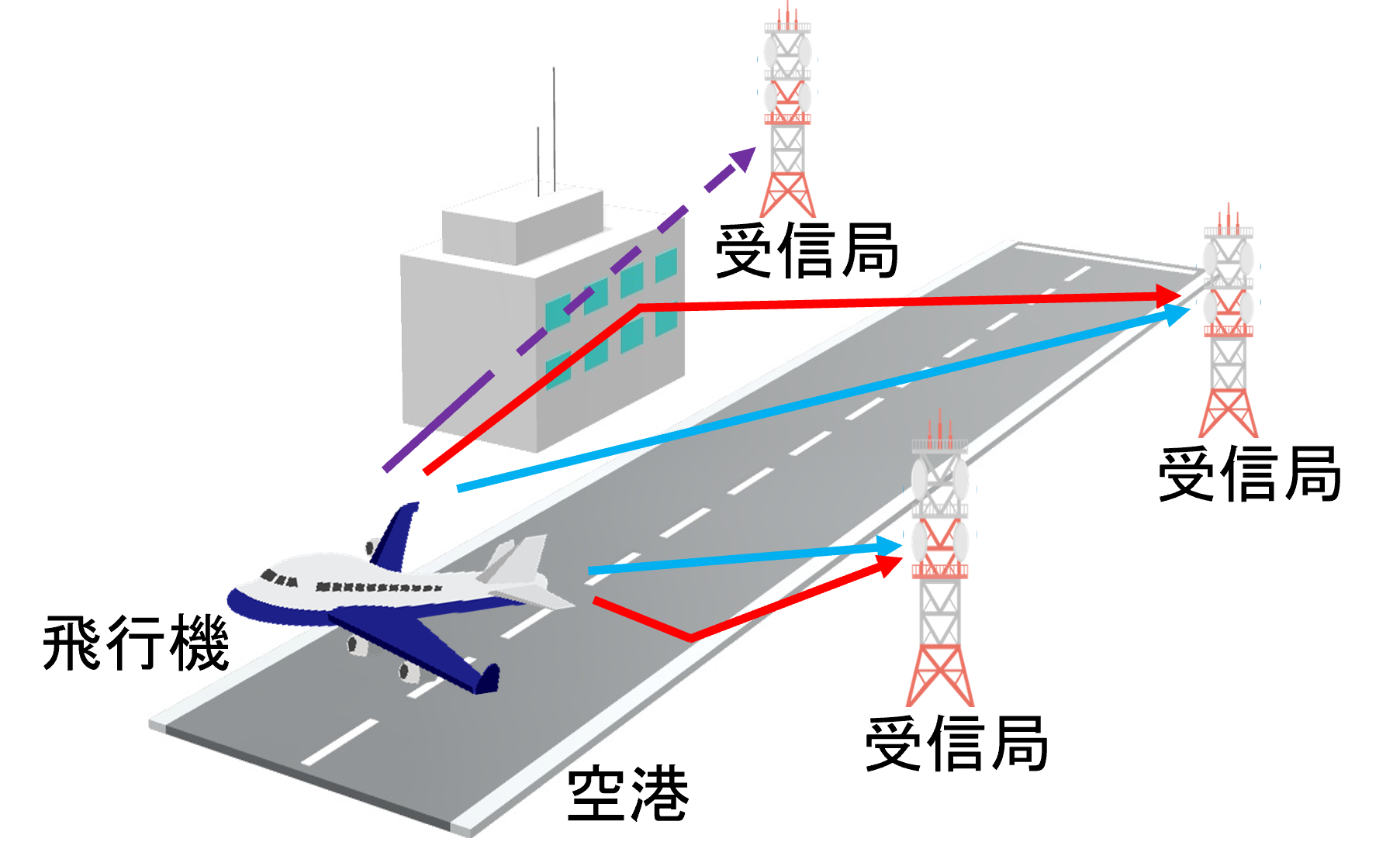
飛行機の位置を特定する技術は、安全な運航管理や交通制御の高度化に不可欠です。
空港では、飛行機から送信された電波を複数の受信局で受信して、受信時刻の差(TDOA)を用いて位置を特定するシステムが使われています。
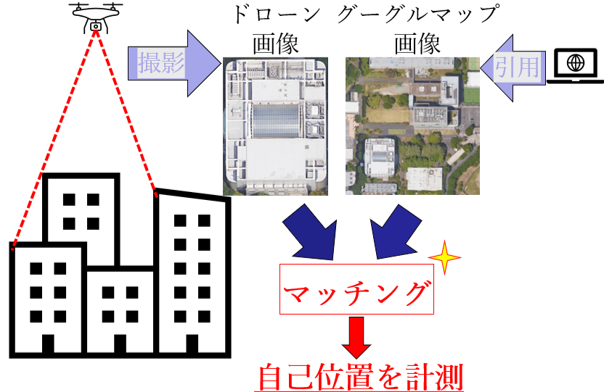
近年、DRONEや飛行可能な車の台頭してきています。
これらは一般にGPSで自己位置を計測しながら飛行しています。ですが、状況によってはGPSが自己位置の計測を誤ってしまう場合があります。その場合においても、正しい自己位置の計測を継続できるような技術が求められています。
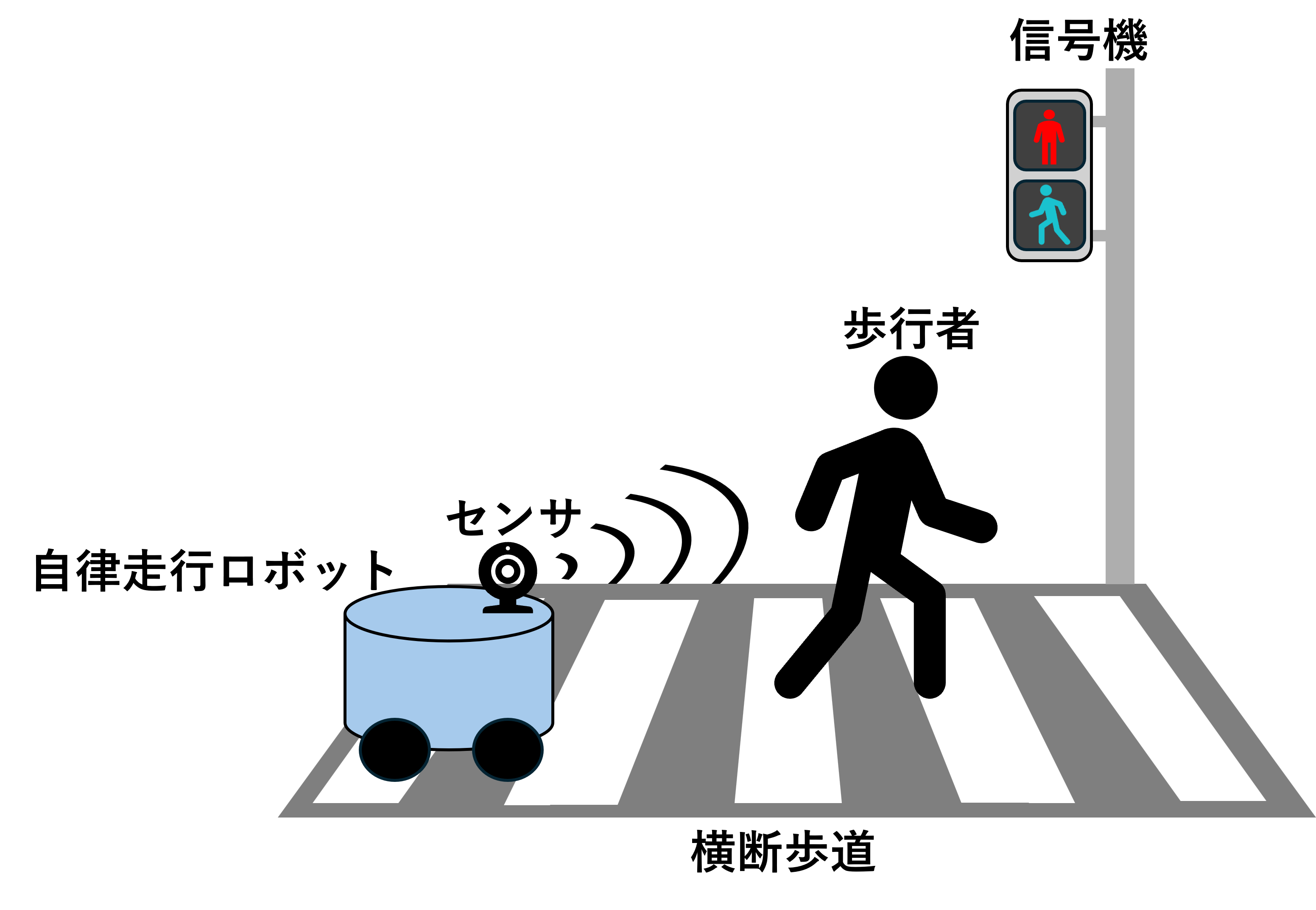
近年、物流業界では人手不足や業務の効率化が課題となっています。
特に、高齢化の進行により、生活支援のニーズが増加しており、従来の配送手段では対応が難しくなることが懸念されています。こうした課題を解決するため、本研究では、自律走行ロボットを移動手段や新たな配送手段として活用することを目指し、その実現に向けた研究を行っています。