自律航法・物体検出
背景
近年、自動運転技術の実用化に向けた開発が多くの企業や研究機関で進められており、その実現には車両の自己位置標定を高精度かつリアルタイムに把握する測位技術が不可欠である。
高精度測位の1つとしてReal-Time Kinematic(RTK)測位がある。
RTK測位は基準局(固定された地上の観測点)と移動局(測位を行う端末)との間でリアルタイムに誤差補正情報をやり取りをする。
基準局は正確な位置情報を持ち、衛星信号の誤差(電離層遅延や対流圏遅延など)を補正データとして移動局に送信する。移動局はそのデータを利用して、瞬時に高精度な位置を計算することにより、センチメートル単位での高精度な測位がリアルタイムで可能になる。
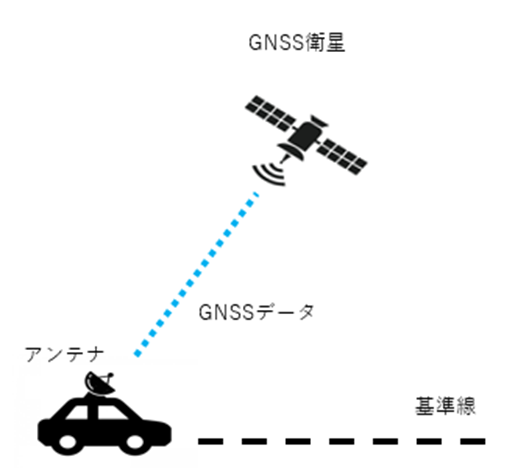
図 RTKイメージ
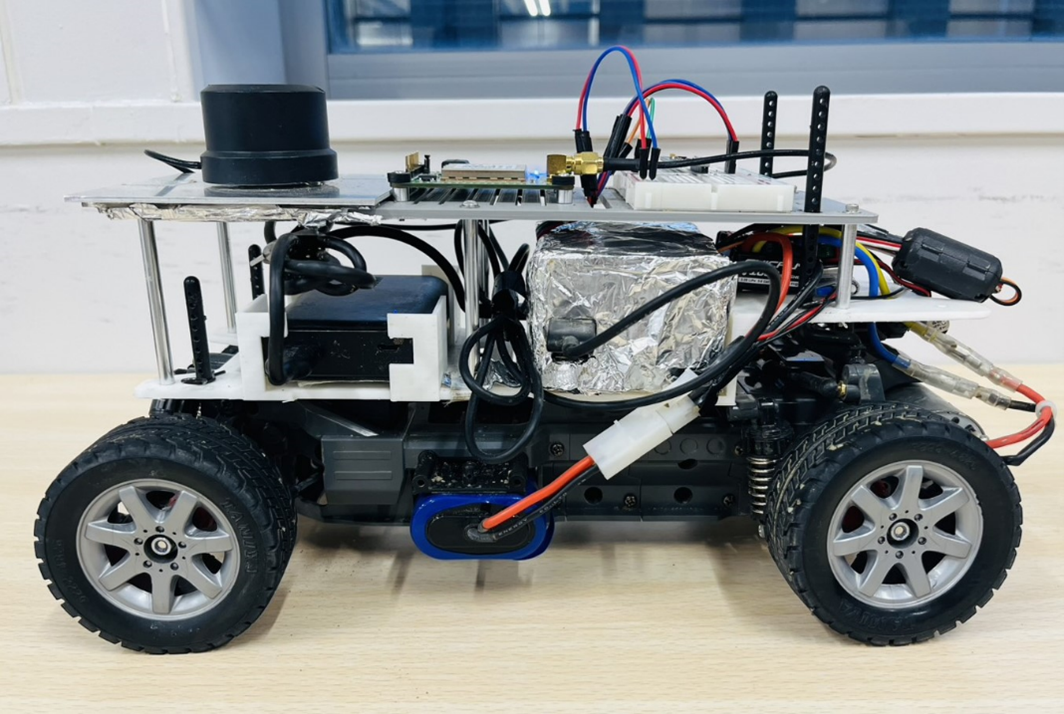
図 作成したロボットカー
研究内容
【RTKを用いたロボットカーの制御】
RTK-GNSSとIMUを用いた自律走行RCカーを構築し、Pure Pursuit、Stanley、LTV制御などの複数の経路追従手法を同一条件の実機実験で比較評価。

図 実装イメージ

図 ロボコンの様子
<< 前のページに戻る
