

![]()
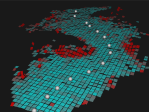 Localizationとは位置を知る技術.ロボットにとっては,周りの地形との相対的な位置関係を知ることがより重要になるので,地図を作りながら,その地図の中での位置を計算しながら移動します.
Localizationとは位置を知る技術.ロボットにとっては,周りの地形との相対的な位置関係を知ることがより重要になるので,地図を作りながら,その地図の中での位置を計算しながら移動します.
![]()
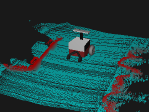 ロボットは動きながらリアルタイムに環境を計測し,モデルをつくり,走行可能かどうか評価して通るべきルートを見つけなければなりません.AMSL Racing ではスキャニングタイプのレーザ距離計を用いて環境計測を行って世界モデルを作ります.
ロボットは動きながらリアルタイムに環境を計測し,モデルをつくり,走行可能かどうか評価して通るべきルートを見つけなければなりません.AMSL Racing ではスキャニングタイプのレーザ距離計を用いて環境計測を行って世界モデルを作ります.
![]()
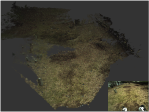 カメラを用いた計測はレーザ距離計によるものに比べて圧倒的に情報量が多いため,非常に魅力的である反面,その情報量の多さ故にリアルタイム処理に困難を伴います.AMSL Racingではカメラを移動体のセンサに用いることに挑戦しています.
カメラを用いた計測はレーザ距離計によるものに比べて圧倒的に情報量が多いため,非常に魅力的である反面,その情報量の多さ故にリアルタイム処理に困難を伴います.AMSL Racingではカメラを移動体のセンサに用いることに挑戦しています.
![]()
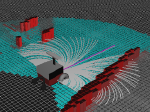 ロボットが実際に走行する際には大域的な目標に向かいながらも,ごく近傍の障害物の位置に応じて安全に通れる道を探しながら,かつその道から外れないように上手に制御しながら走行します.
ロボットが実際に走行する際には大域的な目標に向かいながらも,ごく近傍の障害物の位置に応じて安全に通れる道を探しながら,かつその道から外れないように上手に制御しながら走行します.
![]()
 そこが移動可能かどうか走行可能性や安全性を知るための技術群.例えば現在センサによって障害物のように見えているものが,待っていればいなくなる移動体(人等)なのか,実は乗り上げ可能な柔らかいもの(草等)なのかを認識する技術など.
そこが移動可能かどうか走行可能性や安全性を知るための技術群.例えば現在センサによって障害物のように見えているものが,待っていればいなくなる移動体(人等)なのか,実は乗り上げ可能な柔らかいもの(草等)なのかを認識する技術など.
![]()
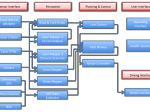 ロボットのコンピュータの中身は複雑で高度なソフトウェアの集合体です. AMSL Racingの場合,一台のロボットの中で同時に動くソフトウェアは数十個にものぼり,互いに通信をしながら様々な状況に対処します.
ロボットのコンピュータの中身は複雑で高度なソフトウェアの集合体です. AMSL Racingの場合,一台のロボットの中で同時に動くソフトウェアは数十個にものぼり,互いに通信をしながら様々な状況に対処します.