

Modeling on the fly
How the world's shapes are?
ロボットは走行しながら,前方がどうなっているのか,通れるのか通れないのか,何か物があるのかないのか,あった場合はどの様な形状をしているのかを計測しなければなりません.これは簡単なように見えて,実は結構大変です.センサで計測できるのは,あくまでロボットとの相対的な位置関係にすぎません.ロボットはどんどん動いているので,計測した瞬間にどこにいたかがわからないと,計測した点が世界座標の中のどこだったのかがわからないからです.ロボットは,ロボットからみてどこに「何か」があるかを計測しながら,それをすべて,世界座標に変換しながら世界モデルを再構築しているのです.

このような場所をロボットが走行します.左側には乗用車の列が,右側には低い縁石があり,その上には丸く剪定された低木が沢山連なっています.
Team AMSL Racingのロボット,Infantには,斜め下向きにスキャニングタイプのレーザ距離計*が取り付けられていて,前方の地面をとらえています.ロボットが高さ5cm未満の低い地面だと判断した部分は水色に,5cm以上の高さを持つ障害物は赤く表示されています.
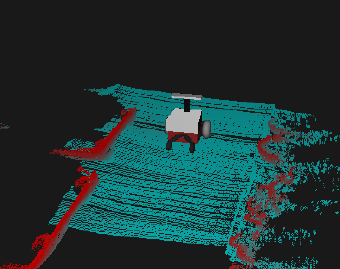
ロボット自体が小さく,センサの位置が低いところにあるため,左側にある自動車の全体の形状はわかりませんが,車体下部と丸いタイヤが付いているのがわかります.右側には,縁石の段差と,その上に丸い低木が写っているのがわかります.
Real-Time World Modeling
リアルタイムに環境モデルを構築している様子をビデオで示します.ロボットは車の脇に沿って直進した後,左折していく様子がわかります.
Evaluation & Planning
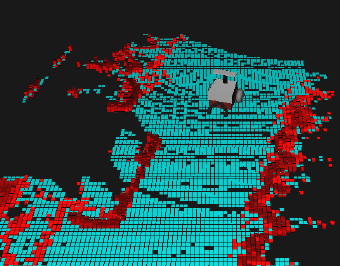
自律移動ロボットの場合,環境計測をすればそれで終わりになるわけではありません.そこが通れる場所なのかどうか?を評価し,走行ルートのプランニングを行わなければなりません.以下の図は,レーザによる計測値を,グリッド状のマップモデルに変換したところを示しています.このグリッド一つ一つを評価して,ロボットが通れるルートを探索します.
*スキャニングタイプのレーザ距離計(Scanning Laser Range Finder)
レーザビームをミラーでスキャンさせて周囲の物体までの距離を計測するセンサ.Team AMSL Racingでは,北陽電機(株)様のご協力の下,レーザ式測域センサUTM-30LX (Top-URG)を利用しています.