

Problems of SLAM in dynamic outdoor environments
To achieve accurate localization by SLAM in dynamic outdoor environments is a very challenging problem for following reasons. One is spurious landmarks can easily enter the map because of moving objects (e.g. pedestrians, cars and bikes) and objects which have complicated shapes (e.g. plants, trees). As a result, the SLAM will have serious error. Another reason is that the number of landmarks in the map increases because of the spurious landmarks. According to the results, computational cost increases and doing SLAM on the fly will become difficult. Our objective is to solve these problems and make it possible to do SLAM in dynamic outdoor environments.
Robust landmark estimation with Unscented Sampling
Our objective is to solve these problems and make it possible to do SLAM in dynamic outdoor environments. In order to achieve this objective, stable feature detection by a laser range finder and efficient data management are introduced. The stable feature detection is used to select static and characteristic landmarks, and it is possible to estimate the position of each
landmark accurately in the dynamic environments. The data management is introduced in order to decrease computational time and localization errors of SLAM. Unscented Sampling is a sampling technique based on unscented transformation for estimating landmark and robot's position accurately. The Unscented transformation is a statistical technique to estimate a nonlinear system. We adopt the unscented sampling for SLAM in dynamic outdoor
environments.
SLAM simulation and experiment.
Animation 1 is a SLAM simulator. We prove the effectiveness of our SLAM with the simulator. The simulation result proved that the computing time and the maximum position error of SLAM decreases by 80% compared with typical landmark estimation method. Figure 2 shows experimental result in a real dynamic outdoor environment. The result shows that our SLAM is
very accurate in the dynamic outdoor environment.
Animation 1: SLAM simulation; the simulator is made on MATLAB and XNA. FastSLAM2.0 is used on the simulator. The simulator can use virtual landmarks which is set by users and actual sensor data (e.g. LRF, Stereo camera).
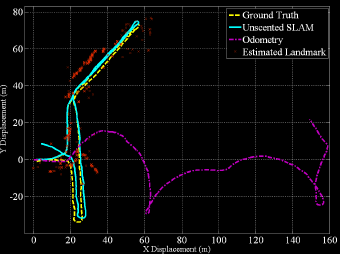
Figure 2: SLAM result in the dynamic outdoor environment. The experiment field was Tsukuba Central Park. The green line, the red line, the blue line and the black points indicate the trajectory of odometry, SLAM trajectory, Grand truth, and estimated landmarks respectively. The result shows that our SLAM is very accurate in the dynamic outdoor environments.