

Autonomous navigation and problems
Autonomous mobile robots are expected to explore unknown environments such as urban or unstructured fields. There are three important functions to achieve the exploration missions. They are to know self-localization i.e. positions and poses of a robot, to analyze whether environment around a robot would be safe or not, and to plan motions or paths, which indicate how a robot goes in next based on the constructed hazardous map. We call them Localization, Map building and Motion or Path planning, respectively. Mobile robots could reach predefined a target location autonomously, if the three functions would work well.
However, motion or path planning has several preconditions to be performed. they need accurate localization and mapping in general, and it is challenging to acquire the good estimations, especially in unknown outdoor. In addition, the map around the robot has to be also constructed robustly without observation error whenever the robot would go through unknown fields or even if the measurement includes noise. Because it is indispensable to measure accurate shapes and positions of the hazardous objects for safer autonomous navigation. To accomplish these problems completely, we introduce an approach and it’s
called Simultaneous Localization And Mapping.
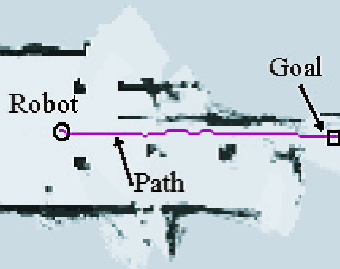
Figure 1: Sample navigation result. Left picture shows a mobile robot and experimental environment. Right figure displays that the mobile robot roved around the area and constructed the consistent map. A path is generated from current position to predefined goal based on the constructed map. The map presents wall and columns shown in left picture.

Navigation system integrated with SLAM
In the solution of the system integrated with SLAM, however, its computation requires too much time and this is the serious problem to use SLAM. The problem causes to fail to track a generated path by feedback control using robot’s state because of slow pose updating of SLAM. Therefore, autonomous navigation which includes estimating localization and map with SLAM should be streamlined.
So we propose solutions of speed up SLAM’s computational time for navigation and the total navigation system integrated with SLAM. Computing the SLAM takes about 1 second when 20 particles are generated. We introduce interpolating localization to speed up pose updating for carrying out path following accurately. The interpolation is integrated with odometry motion model with SLAM and EKF’s localization. The proposed system computes the both of SLAM and EKF based localization simultaneously, and the state updating can be carried out at 100 ms to satisfy the path tracking control.
We showed an experiment to prove that the mobile robot could carry out autonomous navigation in the outdoor field with our system. This result presents that the mobile robot reached the predefined goal without collision with any obstacles in estimating good position and map simultaneously.
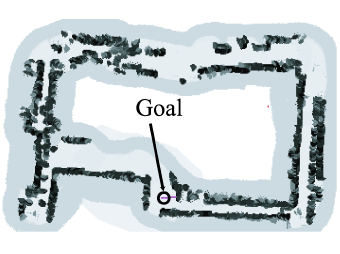
Figure 2: Target navigation system integrated with SLAM. SLAM algorithm is used to acquire accurate map of environment. Cost fields of the environment is computed for path planning from the result of traversability analysis. The cost field indicates how hazardous area the robot drives through. And then, the safer path is planned based on the traversability of the environment. Finally, the robot can follow the generated path accurately, the autonomous navigation will be accomplished.