

ROSを使って自律移動を達成
Application example
coming soon...
Using ROS
Advantage
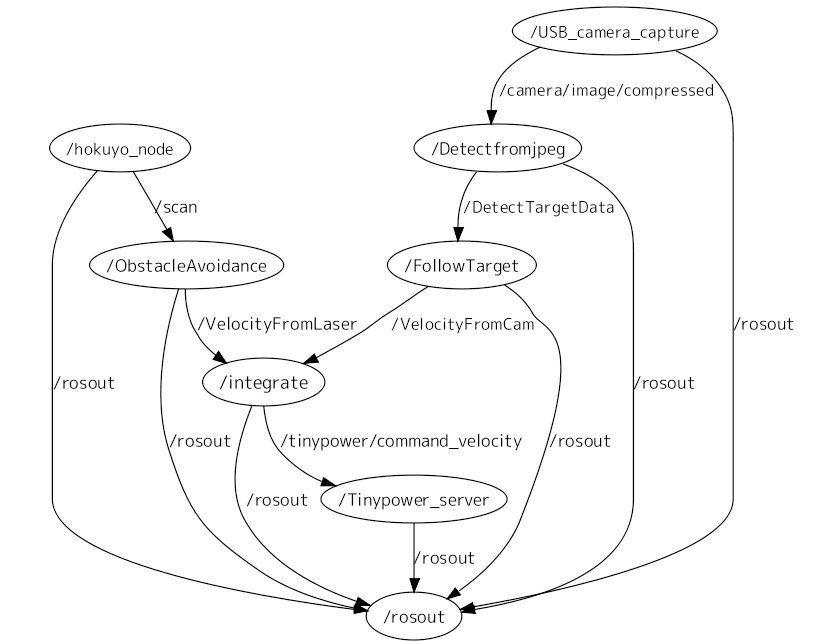
Infant miniのシステムでは,ソフトウェアインターフェイスを共通化するため,Robot Operating System
(ROS)****を利用して自律システムを開発しています.
ROSは,Willow Garage社が開発し,フリーで公開されています.
これは,ロボットのためのメタ・オペレーティング・システムで,ネットワーク機能,モジュール分散開発,ログ記録・再生など自律移動に必要となる機能を含んでおり,
自律移動システムを開発する際に付随するルーチンワークが大幅に軽減できます.
これらの事から,AMSLではROSを利用して開発を行っています.
また,ROSに存在する他者が開発した自律移動システムを利用する事で,開発の効率改善をはかる事ができます.
Is that result reliable?
Design policy
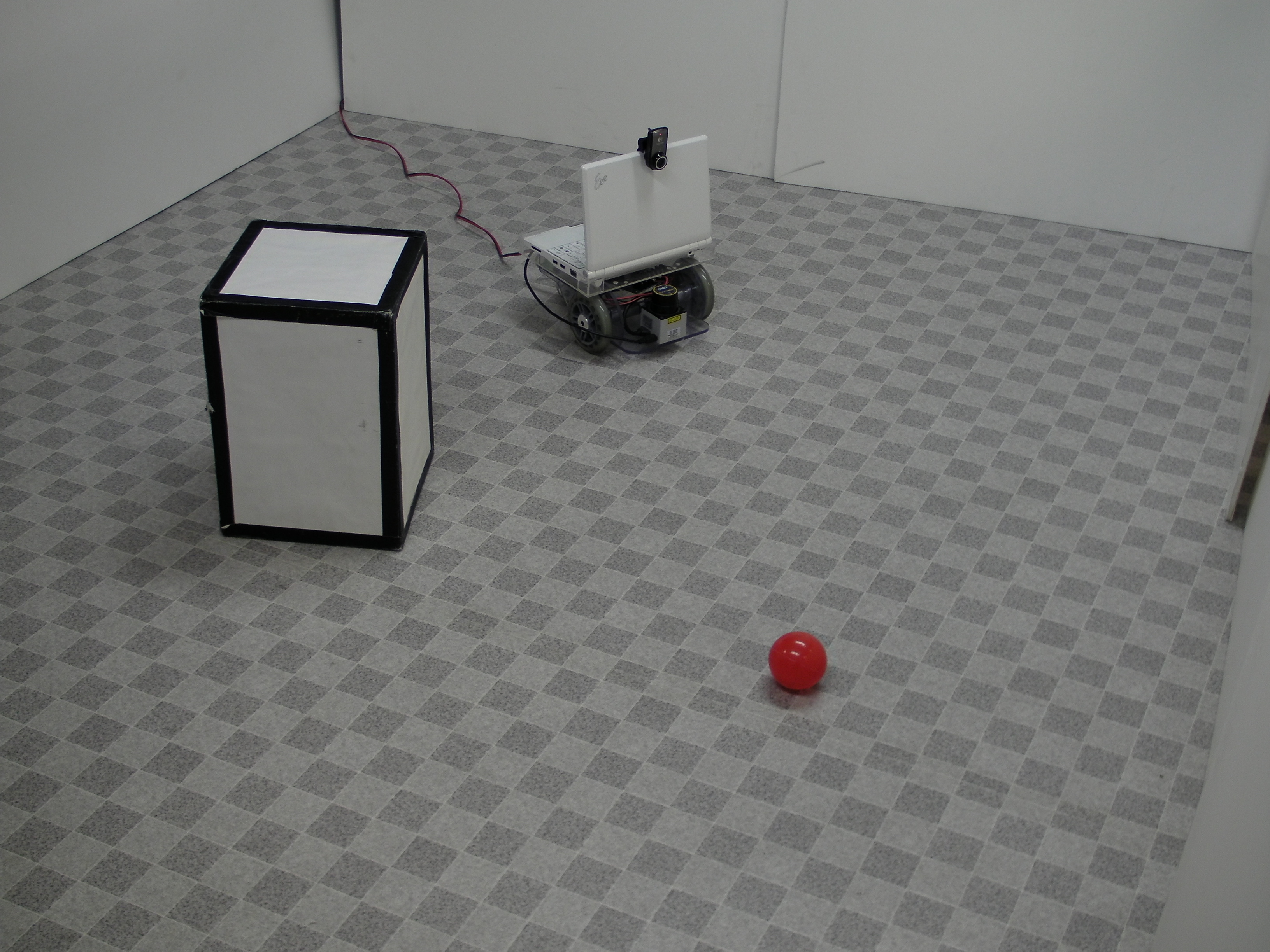
研究成果を実験により正しく評価するためには,品質が良く再現性のあるデータが取れる実験装置が必要です.Infant は,AMSLで開発した移動ロボット実験機をベースに,Team AMSL Racingが様々な改良を施した移動ロボットシステムで,基本構造および動力部にはロボット用の実験ベースに比べて出荷台数,総走行距離実績共に圧倒的に大きい電動車いすを改造して用いています.制御部には,高いオドメトリ精度および制御精度を確保するために高精度のロータリエンコーダを装着し, TinyPowerインテリジェントモータコントローラ* を用いて制御しています.
R&D Scheme
通常,研究での実証実験手順は,まず,理論の正しさをシミュレーションにより確かめた後,実際にロボットにソフトウェアを搭載して実験を行うのですが,実はシミュレーションから実機実験に移行するまでには,実際のハードウェアであるセンサにアクセスしてデータを読み込み,シミュレーションでは発生しないノイズと戦い,ロボットを実世界で動かすために必要な実時間処理に向けた最適化で悩み,と,非常に多くの労力を伴い,長い開発時間を要します.
Team AMSL
Racingでは,この開発に伴う労力と時間を最小にし,開発効率を最大化することを狙って,Infantとソフトウェア互換性をもつ室内向け小型移動ロボット
Infant mini*** を用いて初期開発を行い,その後Infantを用いて屋外試験を行うという開発手法を用いています.
Specifications
大きさ |
W220 x
L230 x H300 [mm]
|
|---|---|
重 量 |
3.0 [kg]
|
最高速度 |
16 [cm/s]
|
プロセッサ |
Intel Atom 1.6GHz / OS: Linux
(Ubuntu 9.04) |
センサ |
Scanning LRF, Imager, Wheel Encoders
|


* Infantシリーズは,オカテック(株)のインテリジェントモータコントローラ"TinyPower"を採用しています.
** Scanning LRFには,北陽電機(株)の測域センサを利用しています.
*** Infant mini は,オカテック(株)より入手可能です.
****http://www.ros.org/wiki/