

Is that result reliable?
Design policy
研究成果を実験により正しく評価するためには,品質が良く再現性のあるデータが取れる実験装置が必要です.Infant は,AMSLで開発した移動ロボット実験機をベースに,Team AMSL Racingが様々な改良を施した移動ロボットシステムで,基本構造および動力部にはロボット用の実験ベースに比べて出荷台数,総走行距離実績共に圧倒的に大きい電動車いすを改造して用いています.制御部には,高いオドメトリ精度および制御精度を確保するために高精度のロータリエンコーダを装着し, TinyPowerインテリジェントモータコントローラ* を用いて制御しています.
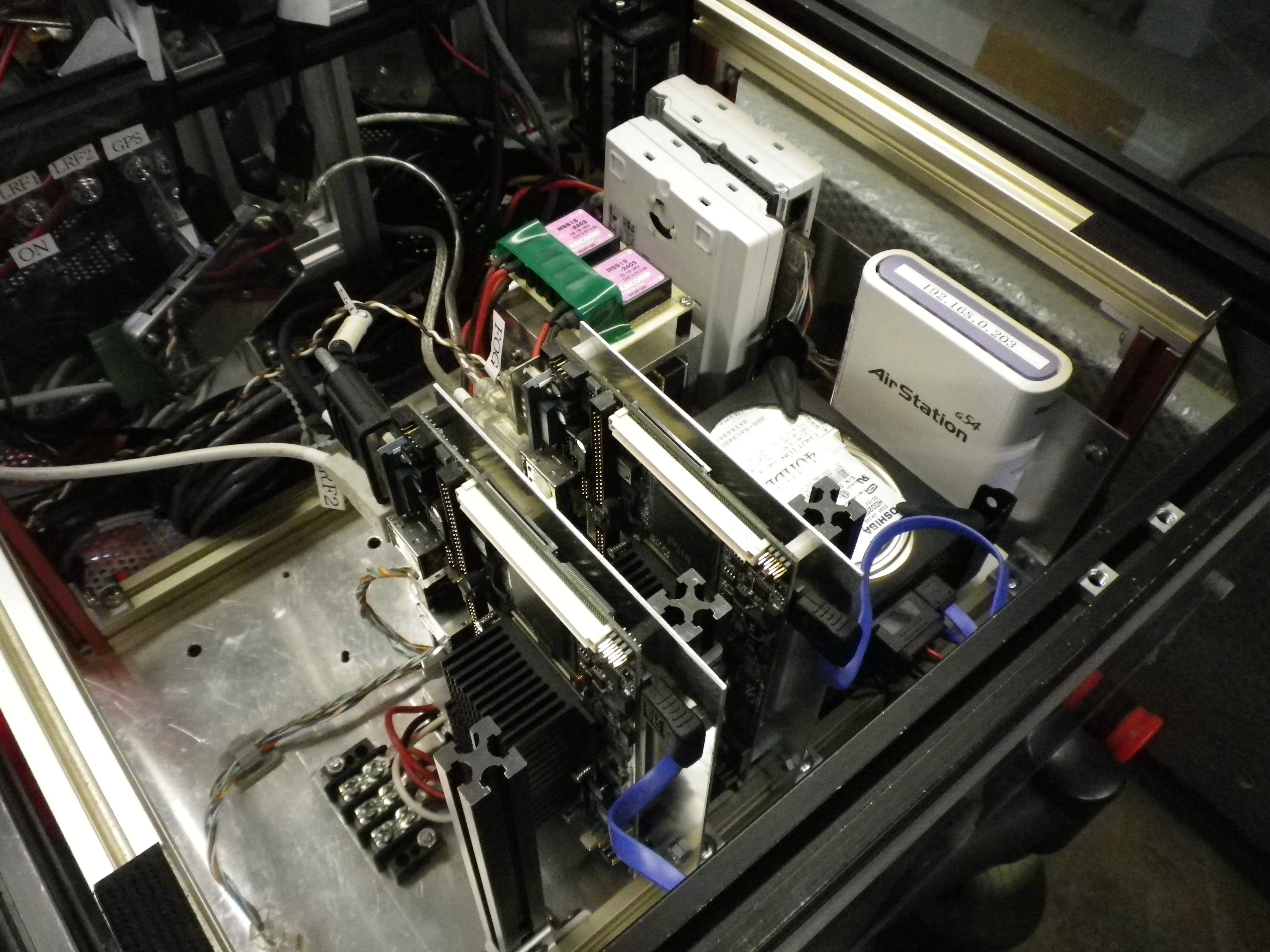
アッパーレベルの制御(アプリケーション)は台車部とは完全に切り離し,すべて上部構造の中に納めています.メインの処理系にはインテル系のCPUを搭載した産業用プロセッサボードを2〜4枚用い,それぞれギガビット・イーサネットによって互いに接続されています.無線LANも搭載しているので,AMSLのラボ周辺ではアクセスポイント経由でネットワークに接続されて,オフィスにあるデスクトップ・パソコンと区別することなく利用することが可能になっています.メインの処理系のOSはLinuxです.
搭載するセンサはアプリケーションによって異なりますが,多くの場合,3軸加速度計と3軸ジャイロを組み合わせてストラップダウン処理をおこなう慣性航法装置(IMU:Inertial Measurement Unit),ディファレンシャルGPS,レーザ光をファン状にスキャンさせて2次元的な周囲形状を計測するスキャニングレーザレンジファインダ**,ステレオイメージセンサを備えています.
R&D Scheme
通常,研究での実証実験手順は,まず,理論の正しさをシミュレーションにより確かめた後,実際にロボットにソフトウェアを搭載して実験を行うのですが,実はシミュレーションから実機実験に移行するまでには,実際のハードウェアであるセンサにアクセスしてデータを読み込み,シミュレーションでは発生しないノイズと戦い,ロボットを実世界で動かすために必要な実時間処理に向けた最適化で悩み,と,非常に多くの労力を伴い,長い開発時間を要します.

![]()
Team AMSL Racingでは,この開発に伴う労力と時間を最小にし,開発効率を最大化することを狙って,Infantとソフトウェア互換性をもつ室内向け小型移動ロボット Infant mini*** を用いて初期開発を行い,その後Infantを用いて屋外試験を行うという開発手法を用いています.


Specification
|
大きさ
|
900L x 590W x 1100H [mm] |
|
重 量
|
60 [kg] |
| 最高速度 |
1.1 [m/s] |
| 航続距離 | 20 [km] |
| プロセッサ |
Intel 2-4 nodes / OS: Linux |
| センサ |
IMU, DGPS, Scanning LRF, Stereo Imager, Wheel Encoders |
![]()
* Infantシリーズは,オカテック(株)のインテリジェントモータコントローラ"TinyPower"を採用しています.
** Scanning LRFには,北陽電機(株)の測域センサを利用しています.
*** Infant mini は,オカテック(株)より入手可能です.