ロボットハンドの機構と制御
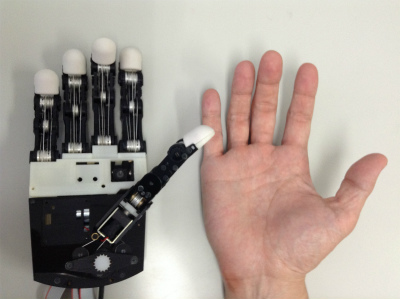
◎ 腱駆動型多指ロボットハンド
人間の手は、前腕にある筋肉の力を腱(ワイヤ)を介して指に伝えることで、細身の形状と高い出力を両立しています。当研究室では、この構造を模した多指ハンドの開発を行い、効率的な腱の配置や、ワイヤの張力制御による巧みな操作の実現を目指しています。
<関連文献>
- Loading reference...
- Loading reference...
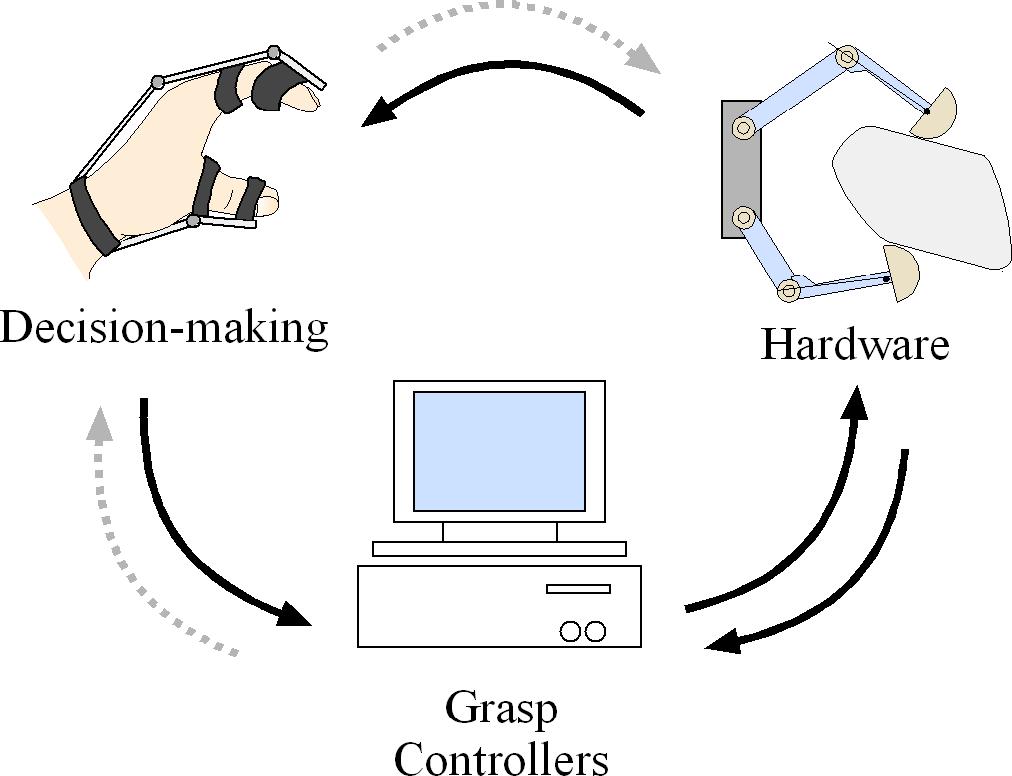
◎ 未知物体に対する把握・操り制御
物体の形状や重さが事前に分からなくても、ロボット自身が触覚や力覚の情報を用いて安定して「掴み」、かつ「指先で転がす(インハンド・マニピュレーション)」ための制御理論を研究しています。
<関連文献>
- Loading reference...
◎ 歯車列を用いたロボットハンド
歯車列を用いて指関節間の連動を実現したハンドの研究を行っています。
<関連文献>
- Loading reference...