◎ ロボットハンドの機構と制御
多指ハンドの構造や制御の研究を行っています。
詳しく見る »
多指ハンドの構造や制御の研究を行っています。
詳しく見る »
多脚・二足歩行ロボットの構造設計や数理モデルを用いた制御に関する研究を行っています。
詳しく見る »
腱駆動機構は腱(ワイヤ)を引っ張ることでロボット等を駆動する伝達機構です。この構造に関する研究を行っています。
詳しく見る »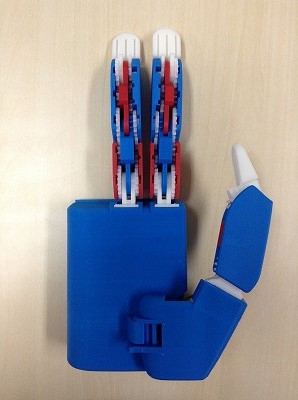
歯車列駆動機構では,複数の歯車を並べて,関節間の干渉を積極的に利用する機構です。
詳しく見る »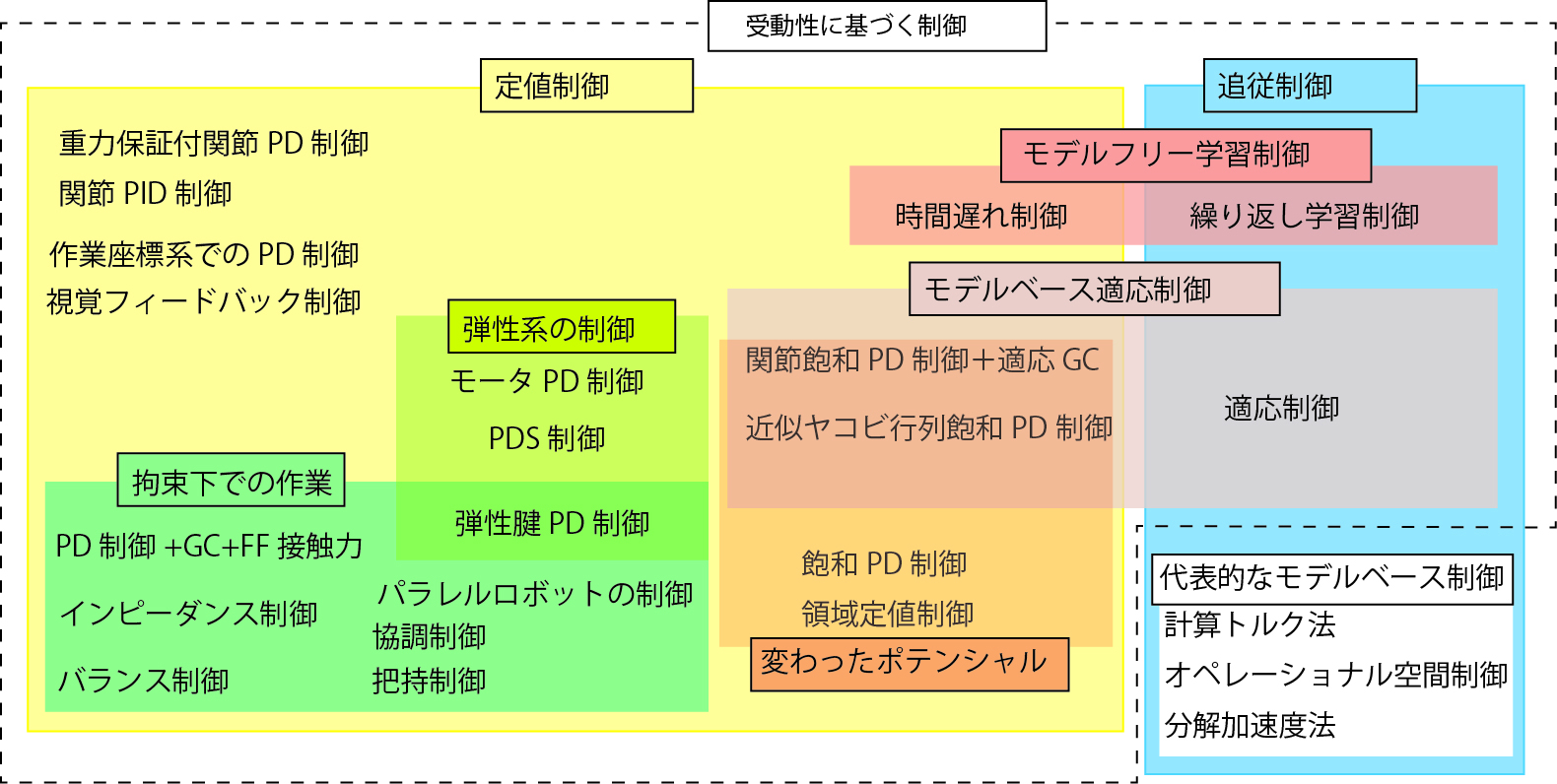
受動性に基づく制御方法は物理系のエネルギの流れから安定化する制御方法です。
詳しく見る »