腱駆動機構の研究
腱駆動機構とは、”腱(ワイヤ)”でリンクを引っ張るロボット機構です。下図は腱駆動機構の例です (左側の二つの円はモータを表し、右の円はプーリ、プーリとリンクをつないでいる線が腱に相当します)。 このモータが腱を引っ張ると、腱につながれたロボットが動きます。 腱駆動機構は、ワイヤ駆動機構やケーブル駆動機構と呼ばれることがあります。 しかしながら、厳密にいうとこれらと腱駆動機構は区別する必要があります。 なぜなら、ケーブル・ワイヤといった名称は、そのハードウェアに由来します。 そのため、ワイヤ(ケーブル)がループ状になって、関節を押し引きできる場合でもこのように呼びます。 一方、腱駆動機構は、人間の腱のように引っ張る機構のみに用いられます。腱駆動機構はもともとモータをリンク部から切り離して、 ロボット自体を軽くするために開発されました。そのため、ロボットの手のような小型な機構によく用いられます。
◎ 腱駆動機構の基本的な特性と構造分類
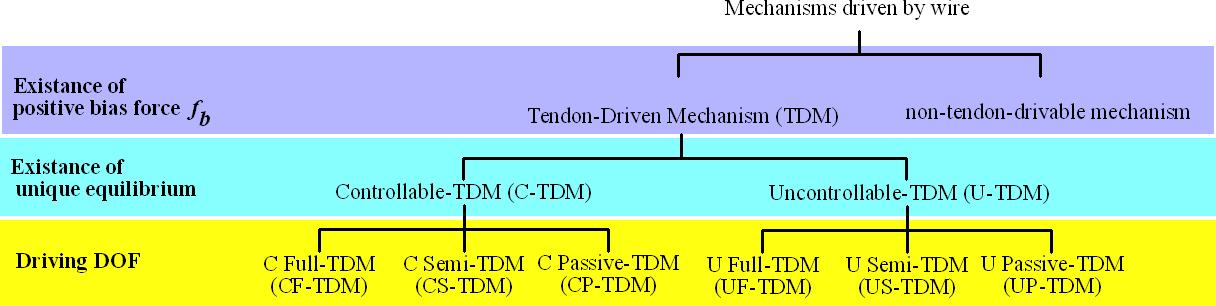
人間の人さし指を見てみると、先端の関節は一つ手前の関節と連動して動き、 先端だけ自由に動かすことができません。このような動きをうまく設計するには、腱駆動機構を解析や設計法が必要となります。 下記の図は、腱駆動機構の分類を表したものです。腱駆動機構は、同じ姿勢を保っていられるか(平衡点の存在)と 幾つの関節が独立に駆動できるか(駆動自由度)ということで6つのクラスに分類することができます。 この分類に基づき、腱駆動機構の設計法を設計しました(Ozawa et al., IEEE TRO 2014)。
<関連文献>
- Loading reference...
◎ 腱駆動機構の腱破断構造の解析とその設計・制御法
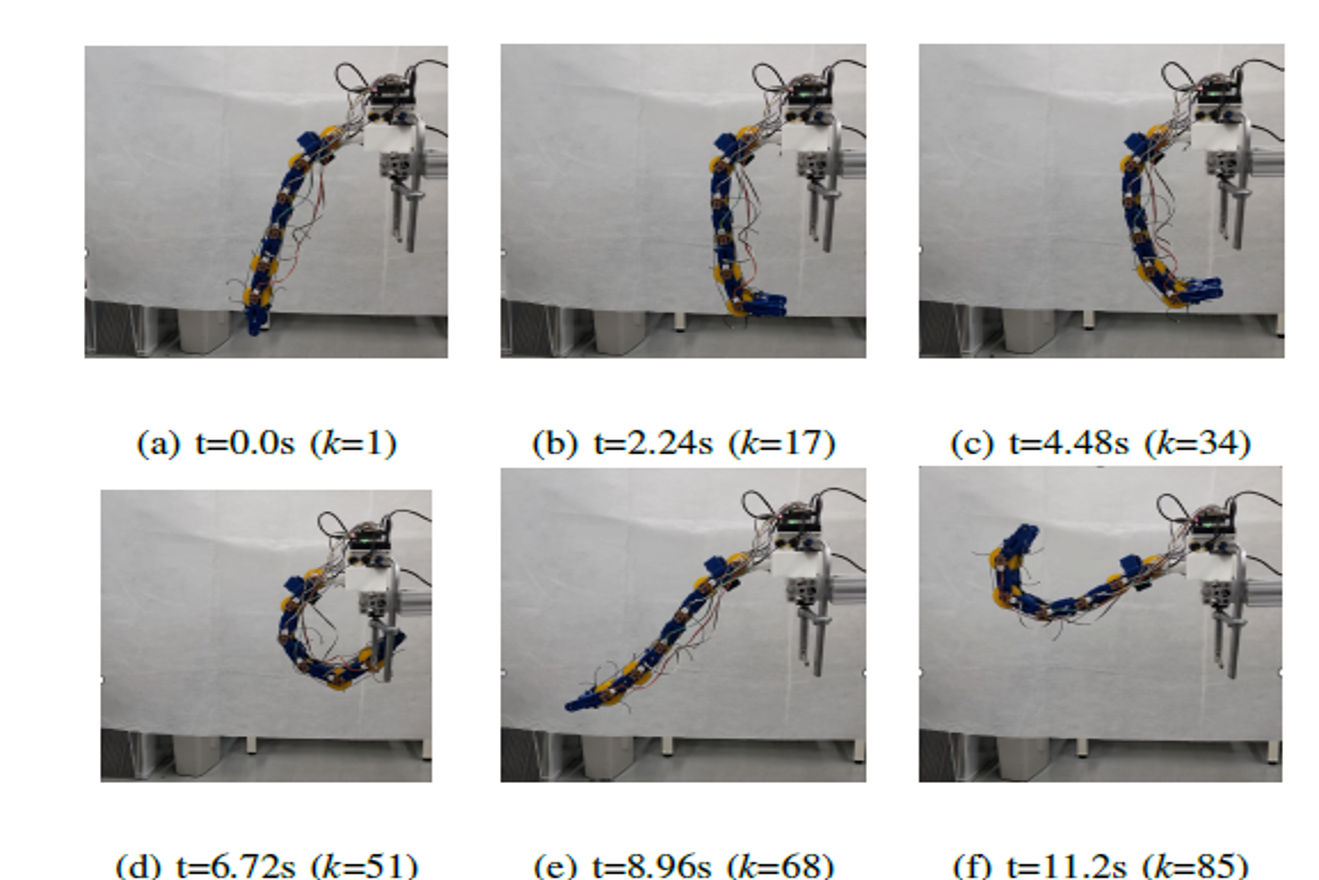
腱駆動機構はその冗長性を利用し,一部の腱が破断しても駆動特性に大きく影響を与えないようにすることができます。 ただし,この腱の配置は適切に設計しないと冗長な分の腱が破断した際に駆動特性が保てません。この研究では,そのような 適切な腱の張り方を作るための代数的構造の解析を行っています。また,腱が破断した際,適切に制御系を切り替えないと 制御性能が劣化します。下記のビデオは,切り替えを腱の長さの統計的なばらつきから判断して制御系を切り替える方法を実装したものです。
<関連文献>
- Loading reference...
◎ 象の動きを模倣した腱駆動機構の設計法
象の動きを観測し,解析した上で,関節の数より少ない数のアクチュエータで元の象の動きに近い動きを実現する腱駆動機構を開発しました。 このような手法を応用することで,様々な動物型のロボット機構の開発を目指しています。
<関連文献>
- Loading reference...
◎ 腱駆動機構の機構的な柔らかさの研究
腱に柔らかさを持たせることで、人間の筋のような柔らかい特性を模倣できるため、 人間と共存を目指すような柔らかいロボットにも多く採用されます。柔らかさを持たせる典型的な方法は、 ワイヤの経路中に弾性要素を挿入する方法です。これにより筋肉が持っているといわれるバネの性質を実現することができます(下図参照)。 腱駆動機構は、引っ張ることのみでロボットを動かすため、通常、関節の数より多い数のモータが必要となります。 このような腱駆動機構をうまく制御しようとするためには、腱の柔らかさを考慮しながら、引っ張ることだけでうまく制御する方法を考える必要があります。そのため、通常のロボット機構より複雑な制御方法を考える必要があります。 下図の腱駆動機構は、すべての腱にモータが取り付けられていますが、実際にはこれらのモータをバネに置き換えて使うことがあります。