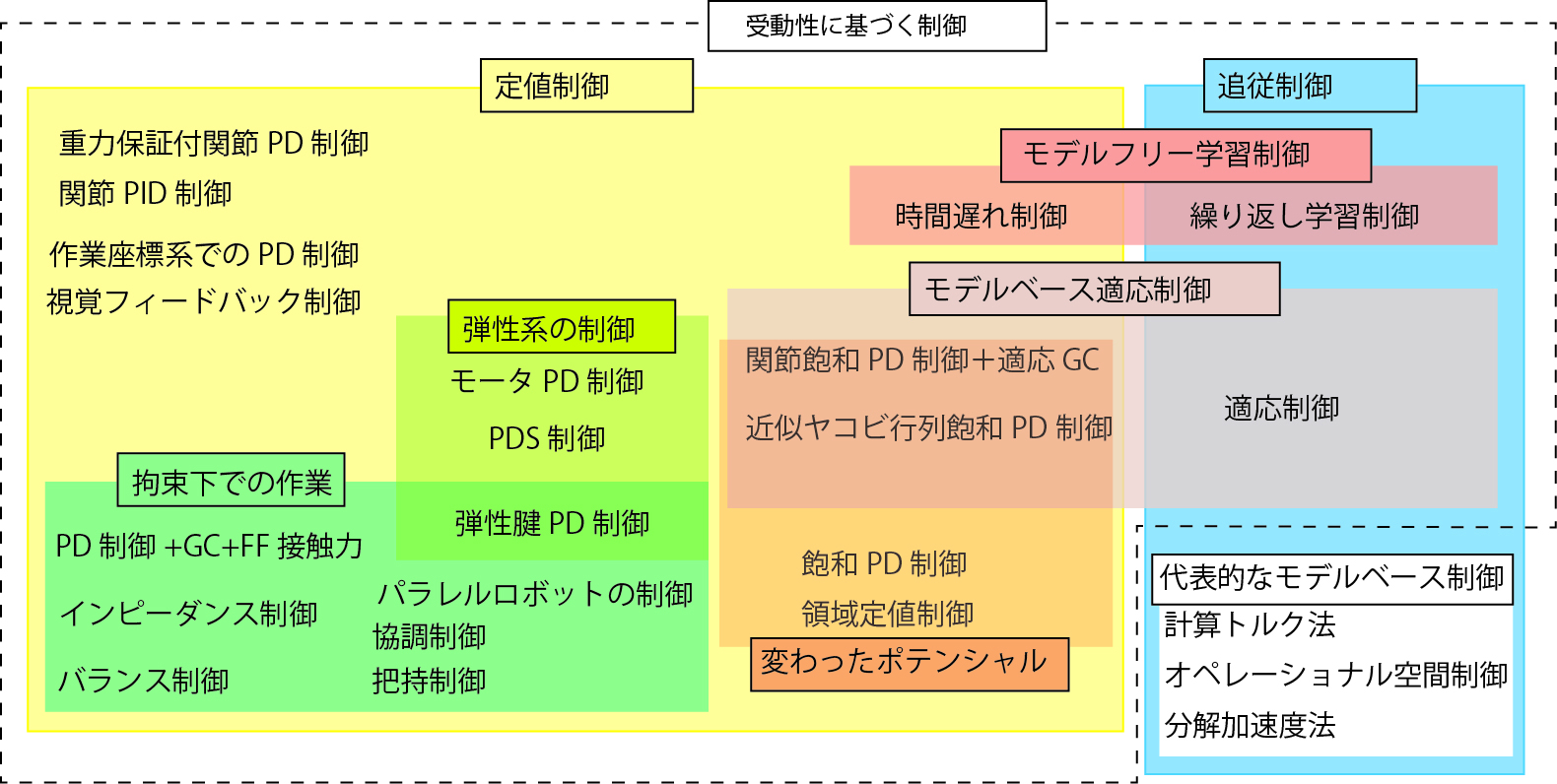
受動性に基づく制御の研究
受動性に基づく制御は物理系のエネルギの流れを利用し, 制御系全体をエネルギを生成しない受動的な系(エネルギーを保存,もしくは散逸する系)になるように設計し,運動を安定化する方法です。 モデルベースの手法に比べて,一般的に安定であり,要求される事前知識が少なく,実装に適した制御系です。 本研究室では,物体情報を用いないロボットハンドの物体操り(Blind grasping), ヒューマノイドロボットの多点接触制御,視覚制御, 腱駆動機構の制御,無重力での質量推定器など,ロボティクスにかかわる様々なシステムに適用し,安定に制御することに成功しています。
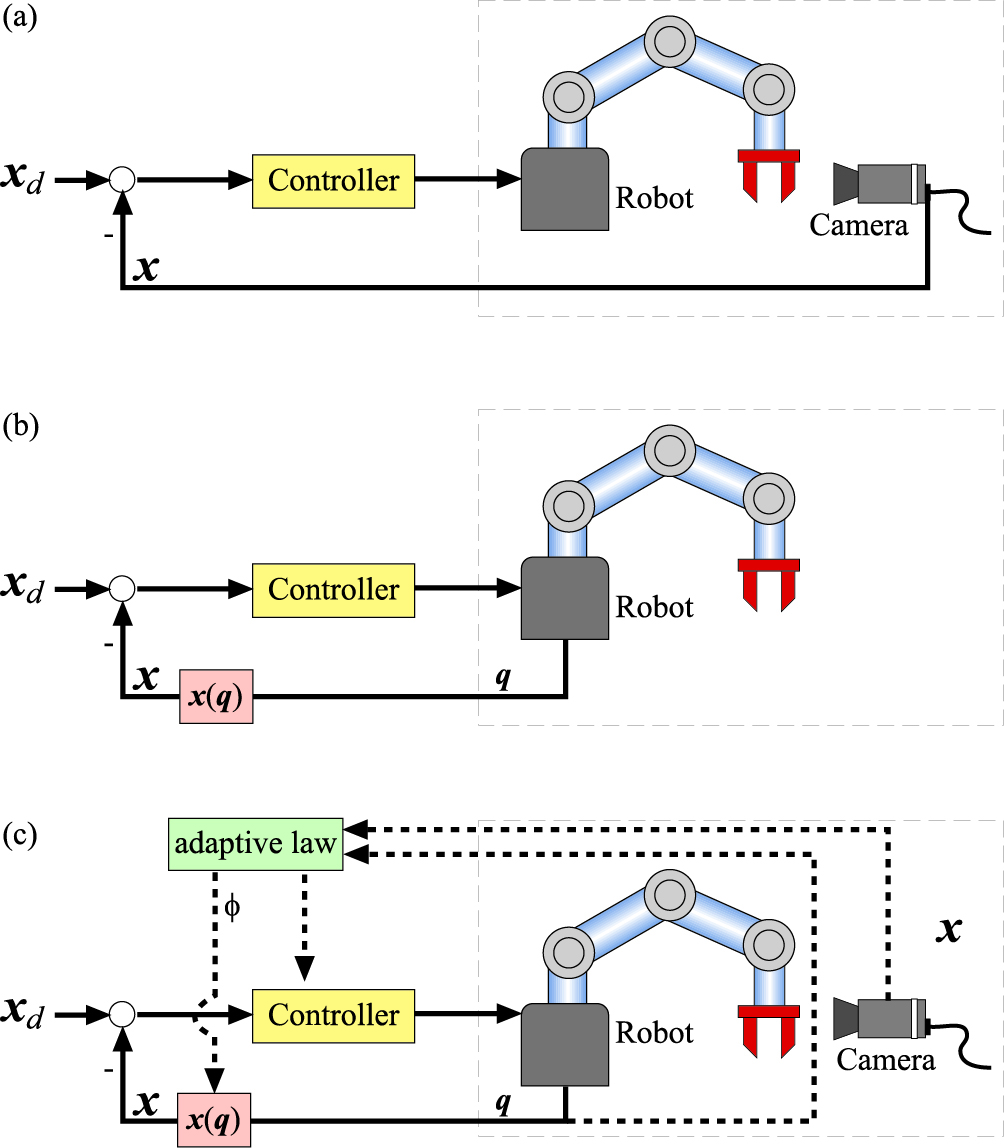
◎ 複数の視覚情報に基づくフィードバック制御
視覚情報を直接フィードバックしてロボットの動きを制御する方法を視覚フィードバックといいます。 視覚フィードバックでは視覚情報がオクルージョンなどで失われた場合,不安定になります。そこで,本研究では, 視覚情報で幾何学モデルの修正をし,ロボットの内界情報と合わせて制御することで,オクルージョン等にあっても安定に制御することができます。 また,現代のように,様々なカメラが取り付けられている環境では,複数のカメラ情報から制御することが重要となります。 この方法は,カメラ間の絶対位置がわからなくても,局所的な情報のみで安定に制御できる方法です。
<関連文献>
- Loading reference...