歯車駆動機構の研究
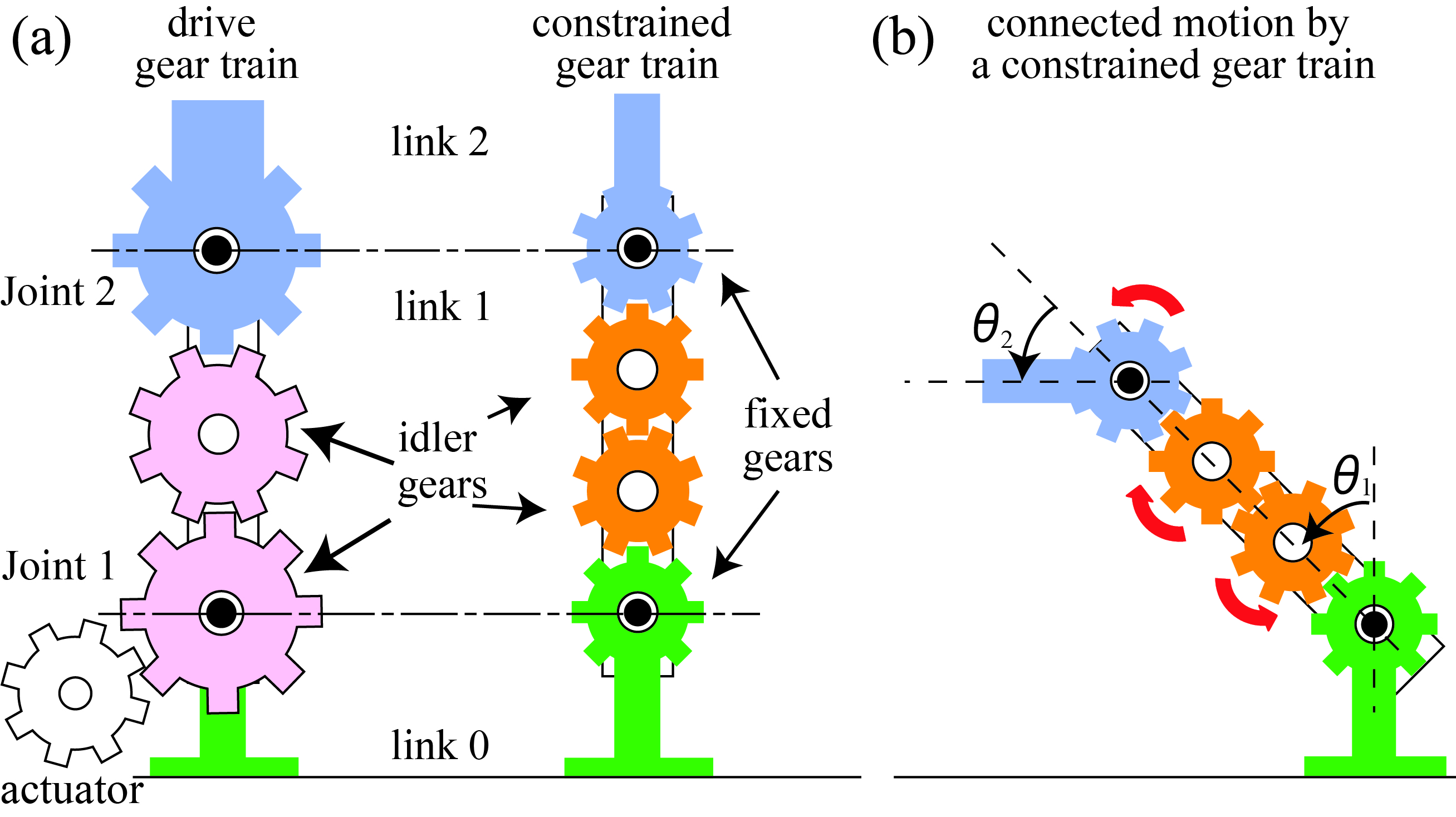
◎ 歯車列伝達機構の理論的研究
人の指は全ての関節が独立に駆動できるわけではなく,例えば,指の先端の関節はその手前の関節と独立に動かすことが難しくなります。このような構造設計の手法を開発しています。
<関連文献>
- Loading reference...
◎ 歯車列駆動ロボットハンドの開発
歯車列を用いて指関節間の連動を実現したハンドの研究を行っています。
指の弾性構造の基本的構造
歯車列を用いた高出力ハンド
<関連文献>
- Loading reference...
- Loading reference...
◎ 簡易組み立て型ロボットハンドの開発
スナップフィット機構を用いて,すぐに組み立て・修理が可能なロボットハンドの開発を行いました。その情報はgithubからダウンロードできます。
<関連文献>
- Loading reference...