

宇宙研公開 2009.07.25
去る7月24日と25日の両日,神奈川県相模原市にあるJAXA相模原キャンパスにおいて一般公開が行われました.明治大学理工学部機械工学科黒田研究室はJAXAおよび中央大学と月面探査ローバの共同研究を行っており,この一般公開でも屋外でのデモンストレーションを行いました.
初日は雨のため室内でのデモを余儀なくされましたが,2日目は何度か短いスコールがあったもののよく晴れ渡り,予定通り屋外でデモを行うことができました.強風のためテントが飛ばされそうになりながらの実施になりましたが,そんな中,沢山のお客様に来ていただきました.
明治大学では,ローバの完全な自律移動シークエンスのデモンストレーションを行いました.これは搭載されたステレオビジョンセンサなどから得た情報によって地図を作成し,ローバ自身の位置と姿勢を高精度に計測し,地図の細かな場所毎に走行可能性評価を行い,その結果に基づきパスを計画して走行します.これらの処理は事前に行うのではなく,すべて走行しながらリアルタイムに行っています.また,すべての処理は搭載されたコンピュータシステムによって行われています.
この処理の内容は,テントの中に作られたミッションコントロールセンタ(右下図)に随時表示されていて,スタッフはローバの状態を確認するべく,モニタを監視しています.ローバへの指令は基本的に目標座標を与えるだけなので,モニタを監視ししてヘルスモニタリングをし,非常時に備える以外は殆どすることはありません.
一部,ご覧になっている方々に誤解があったようですが,このローバは地上用の実験機です.これがそのまま宇宙に行くわけではありません.我々は月面や火星表面の探査を目指してローバのシステムや情報処理,制御などの研究開発を行っていますが,その為には地上で動作するローバをつくり,地上で試験を行わなくてはなりません.
月面は重力が1/6Gで高真空,火星は1/3Gで1/100気圧と,地上とは全く異なる世界ですので,地上用のロボットは他の星の表面では動かせません.また逆に,月面用の宇宙機は地上では動かせません.それぞれに専用設計が必要なのです.我々の実験機,Micro6は宇宙機の地上評価モデルであると同時に,それは1Gで1気圧の惑星(=地球)表面用に専用設計された惑星探査ローバであるとも言えるのです.
我々が研究しているのは,それぞれの条件にあった設計がおこなえる設計の方法論を構築すること,また,比較的共通項の多いセンサや情報処理系のシステム構築です.今回,デモンストレーションを行った自律移動制御は,地球・月・火星のどこでも利用可能な汎用技術であると考えています.
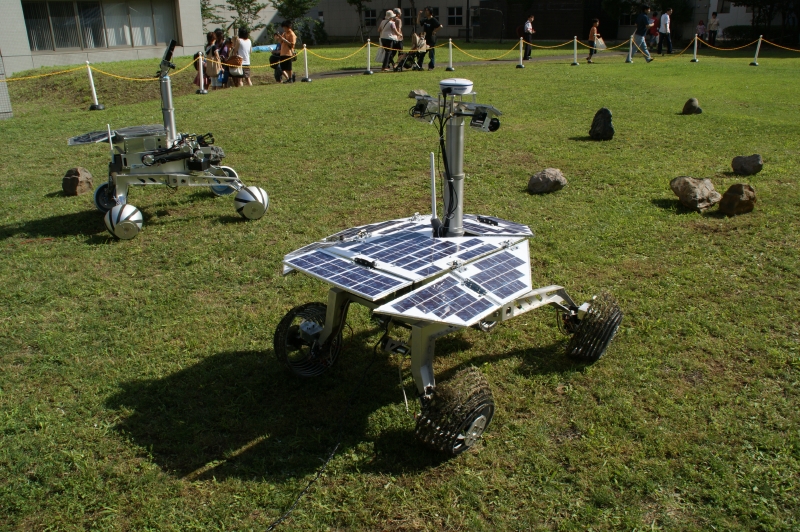
明治大学のローバ実験機Micro6
ステレオビジョンによって地形の3次元マップを作成し,走行可能な経路を見つけ出して走行する.これらをすべての処理を搭載コンピュータによりリアルタイムに行っている.マストトップにはステレオビジョンセンサと実験ログ用のDGPSが見える.ソーラーパドルはダミー.

ミッションコントロール用ディスプレイ
屋外での視認性も考えて24インチディスプレイを4台配置した.左下がカメラの生画像.右下はステレオビジョンで構築した3次元ポイントクラウド.右上は,ポイントクラウドからさらに小領域毎の走行可能性を評価し,その評価結果に基づいてパスプランを行っている様子.左上は速度や傾斜角,車輪のスリップ率などの状態の表示.