留学生最終発表会
2025年9月5日
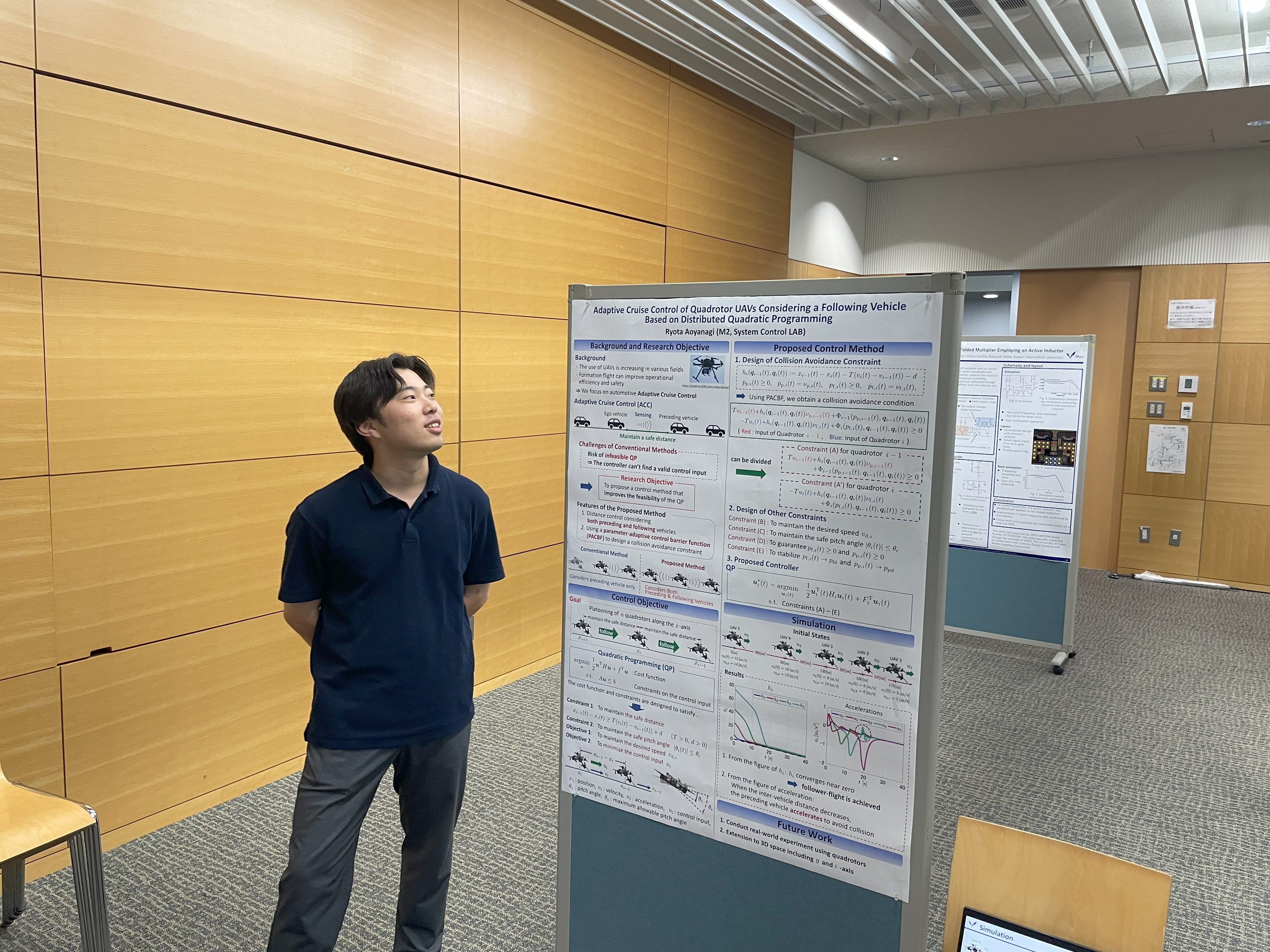
9月5日にボルドー留学生の最終発表会が開催されました. M2青柳が「Adaptive cruise control of quadrotor UAVs considering a following vehicle based on distributed quadratic programming」のテーマの下,発表を行いました.
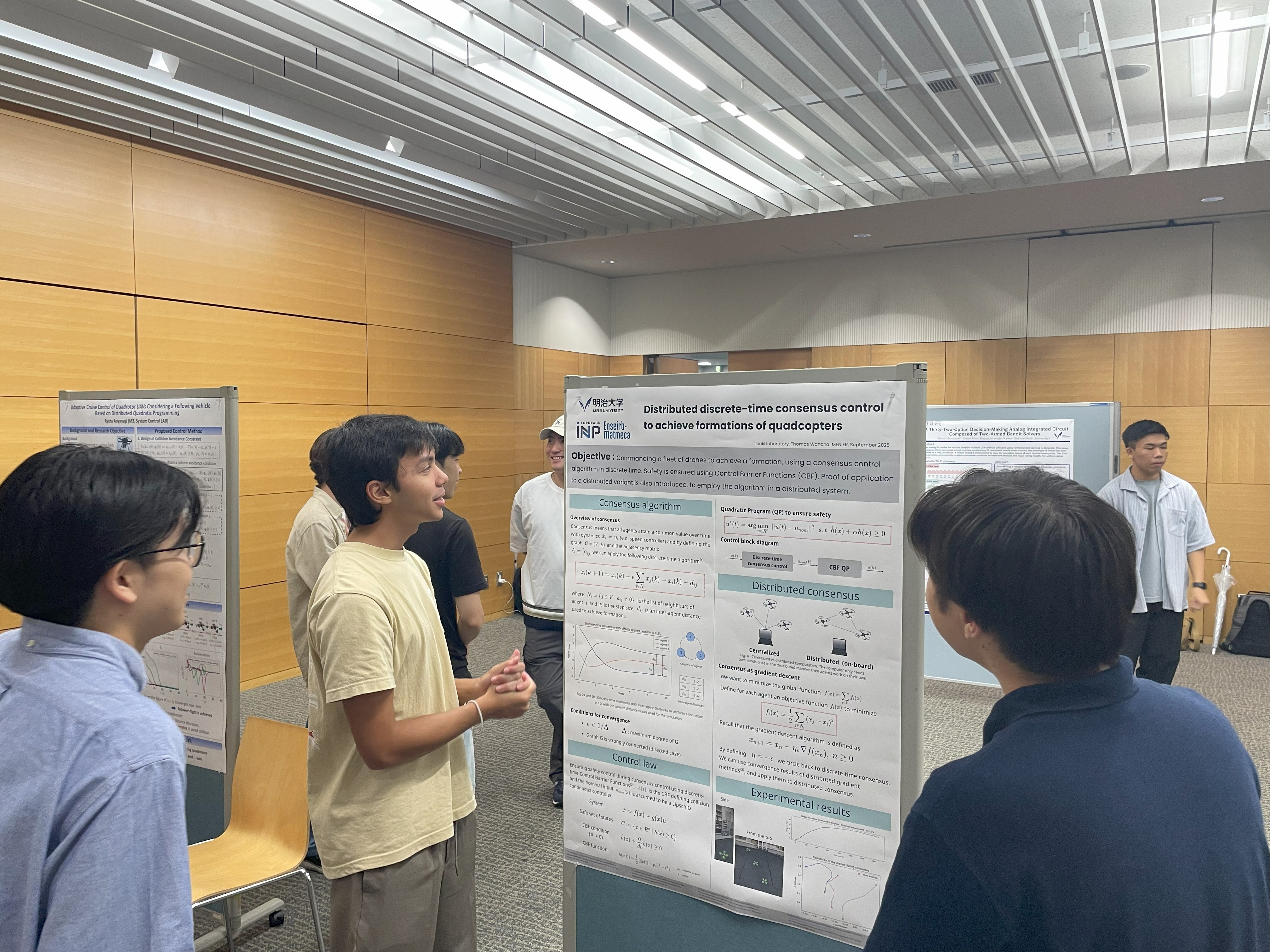
ボルドー留学生のThomasが「Distributed discrete-time consensus control to achieve formations of quadcopters」のテーマの下,発表を行いました.
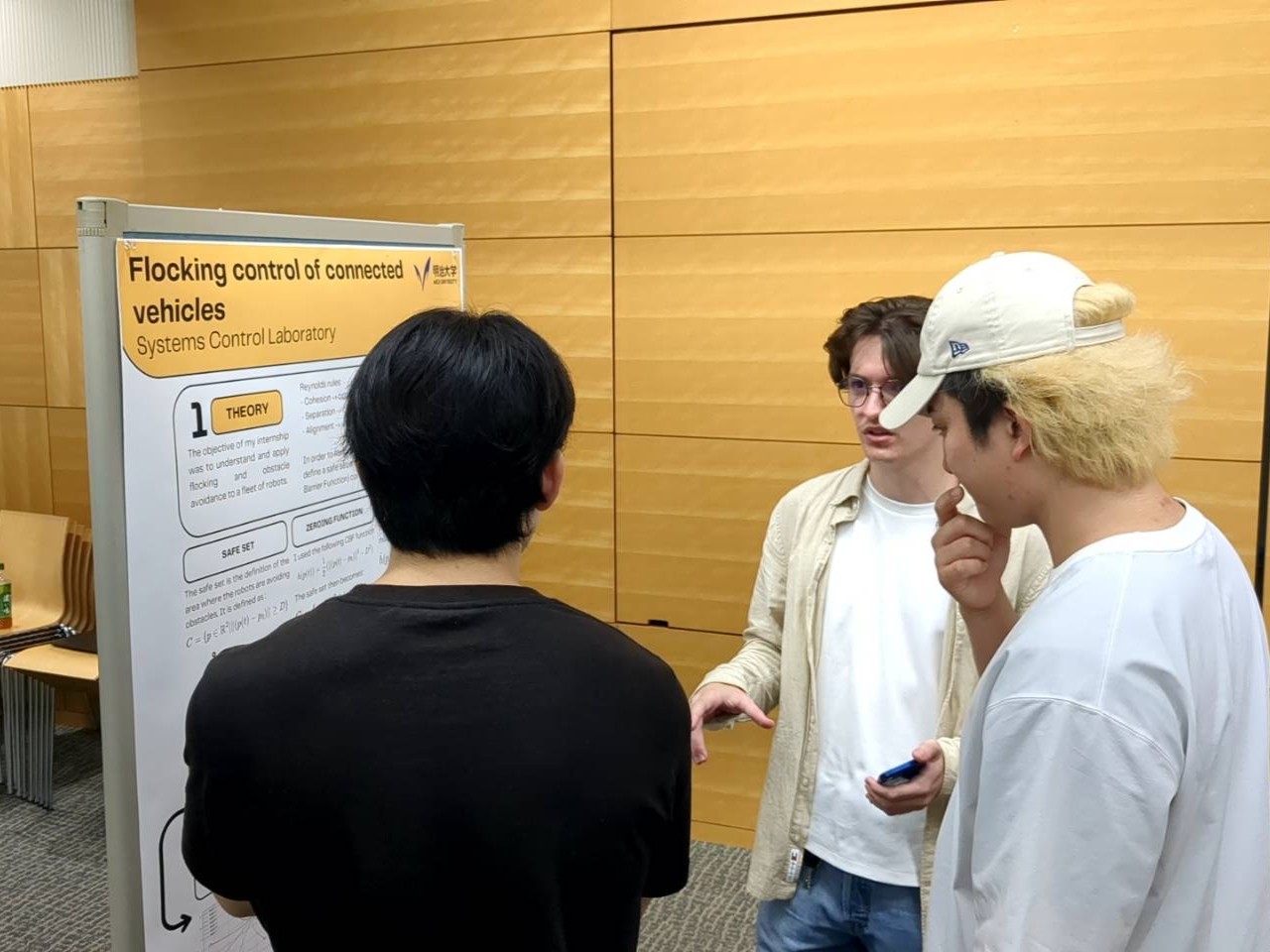
ボルドー留学生のArthurが「Flocking control of connected vehicles」のテーマの下,発表を行いました.
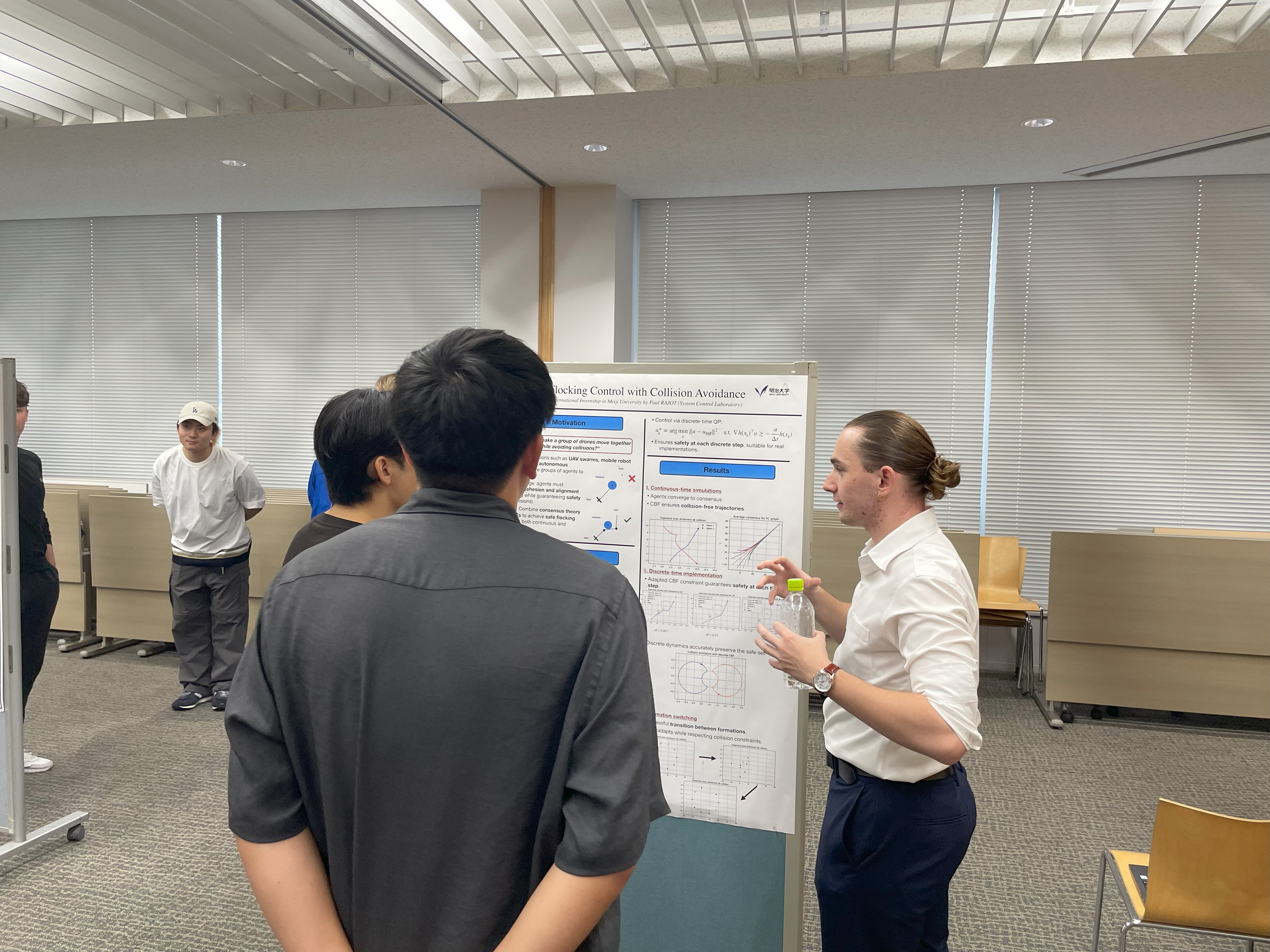
ボルドー留学生のPaulが「Flocking control with collison avoidance」のテーマの下,発表を行いました.