D. ドライビングシミュレータ
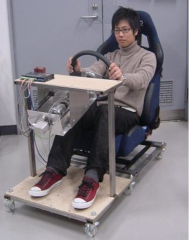
操舵反力模擬装置を用いたステアリングフィールの研究
ドライバは、走行中にステアリングに生じる操舵反力を通して路面の状態を察知することが可能である。特に車速が高い領域においては、ドライバは操舵反力の情報を利用して運転操作を行うといわれている。この操舵反力の特性には、車両重量やスプリングの特性、およびステアリング系のジオメトリが影響している。本研究では、車両パラメータやステアリングジオメトリを考慮したモデルをリアルタイムに解析し、解析結果に基づいた反力をサーボモータを利用して発生させる操舵反力模擬装置を開発した。この装置により、実車を製作する以前の段階で、ステアリングに発生する操舵反力を体感、評価することを目的としている。
- Taichi Shiiba, Wataru Murata, Experimental Validation of Steering Torque Feedback Simulator through Vehicle Running Test, The Journal of Mechanical Science and Technology, Vol. 23, No. 4, pp.954-959, 2009.4
- 椎葉 太一, 榎本 知直, 衣笠 健, 小林 宏, ステアリング系のジオメトリ情報を利用した操舵反力模擬装置の開発, 自動車技術会論文集, Vol. 36, No. 2, pp. 107-112, 2005.3
車両運動のリアルタイム解析
ドライビングシミュレータでは、ドライバの運転操作に応じて車両状態を解析し、その結果をコンピュータグラフィクスやモーション装置を通して直ちにドライバに提示する必要がある。従って、車両運動のリアルタイム解析が必要となる。本研究では、リアルタイム解析の実行環境としてRT-Linuxを利用し、行列演算ライブラリなどを用いることにより、特にマルチボディシステムを対象としたリアルタイム解析の効率化について検討を行っている。
- Masashi Tsushima, Taichi Shiiba, Development of Steering HILS System with Multibody Kinematic Model of Front Suspension,Multibody Dynamics 2013, ECCOMAS Thematic Conference, 2013.7
- 村田 航, 椎葉 太一, 実時間マルチボディ解析を用いたステアリングトルクシミュレータの開発, 日本機械学会 第17回交通・物流部門大会講演論文集 , No. 08-68, pp.283-286, 2008.12
- Taichi Shiiba, Yuuki Sato, Yukinari Tanaka, Evaluation of Force Feedback System Based on Real-time Multibody Simulation, Multibody Dynamics 2007, ECCOMAS Thematic Conference, 2007.6
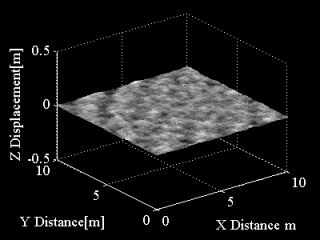
地形情報に基づいた乗り心地特性評価
路面の凹凸やわだちは、車両の乗り心地特性や操縦安定性に大きな影響を及ぼす。本研究では、路面とタイヤのインタラクションを正確にモデル化することにより、地形情報が車両運動に及ぼす影響を評価する。また、解析の結果得られた振動をドライビングシミュレータや振動台を用いて再現することにより、乗員に及ぼす影響についても検討を行っている。
- 桑木 芳久, 椎葉 太一, マルチボディ車両モデルによる不整路面走行時の車両挙動解析, 日本機械学会 第16回交通・物流部門大会講演論文集 , No. 07-51, pp.191-194, 2007.12
- 椎葉 太一, 須田 義大, ドライビングシミュレータを用いた自動車の乗り心地特性評価 (マルチボディ車両モデルを利用したドライビングシミュレータによる検討), 日本機械学会論文集, C編 68巻 670号, pp. 1741-1746, 2002.6
- Taichi Shiiba, Yoshihiro Suda, ediction of Ride Comfort Characteristics with Driving Simulator (An Approach with Multibody Vehicle Model), Proceedings of the 6th International Symposium on Advanced Vehicle Control (AVEC '02), pp. 417-421, 2002.9