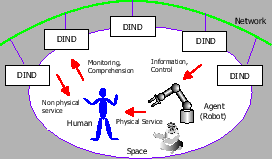
Up until now, the position estimation of human and mobile robots[8], human behavior recognition[9] and mobile robot control under ISpace[10] have been studied. These are the basic functions of space information understanding and human support by robots. One DIND consists of a CCD camera for acquiring space information, and a processing computer which has the functions of data processing and network interfacing. It becomes easy to install new technology as a new module to the ISpace if the protocol and data structure between the DINDs and modules are decided in advance. In an intelligent space, this enable the achievement of a flexible system based on this feature. The human-following robot introduced in this paper is a new module for ISpace, as it is one of the applications located in a level higher than the mobile robot position estimation module.