In this environment, the DINDs are required to cooperate with each other. Effective communication and role assignment are required for the cooperation of the DINDs. We define a DIND that has the control authority of a robot as the dominant DIND for the robot. Each DIND compares the reliability rank based on measurement error and so on. When a robot moves from one area to a different area, the dominant DIND for a robot needs to be changed automatically to the DIND that has the higher reliability rank. This is called handing over of the control authority. The dominant DIND has the control authority of the robots, and only one dominant DIND exists for a given robot at any one time. Details about the handing over are described in [18]. In order to achieve a definite handover, the monitoring areas need to overlap. Moreover, in the proposed control law, the past velocity input is required in order to calculate the new velocity input. When the control authority moves to another DIND, information about the input velocity also has to be transmitted from the last dominant DIND to the new dominant DIND. Therefore, it is possible to input a continuous velocity into the mobile robot. The information which the DINDs share is defined as follows:
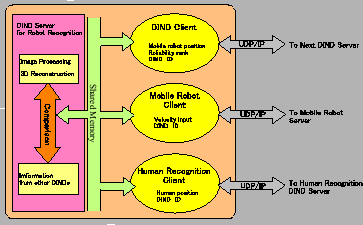
The human-following module of a DIND is realized with the software configuration as shown in Fig.10. A DIND basically makes connections to other DINDs with the client/server method of UDP protocol. A server program of each DIND is always running in order to receive requests for passing the control authority from other DINDs. The client programs are executed according to the situation, such as DIND requests to other DINDs, and so on. When the DIND transmits the velocity input to the mobile robot, the client program for making a connection to the mobile robot will become active if the DIND has the control authority.