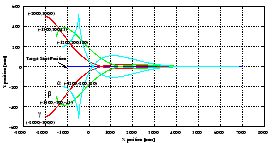
According to changes in the parameters, the mobile robot's trajectory changes,
as shown in Fig.8. In this simulation, the target human
makes a right-angled turn, as shown in figure. ![]() and
and ![]() , which are related to the spring bending, are set constant through
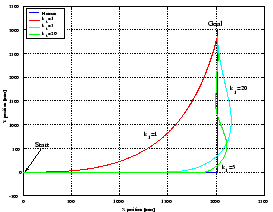
all of this simulation. Fig.8(a) is the trajectory of the
mobile robot when
, which are related to the spring bending, are set constant through
all of this simulation. Fig.8(a) is the trajectory of the
mobile robot when ![]() is changed and
is changed and ![]() is constant. A small
is constant. A small ![]() makes the performance on the right-angled turn worse. On the other
hand, the mobile robot strays from the human trajectory with a large
makes the performance on the right-angled turn worse. On the other
hand, the mobile robot strays from the human trajectory with a large ![]() . If
. If ![]() increases, the trajectory of the robot after turning becomes oscillatory.
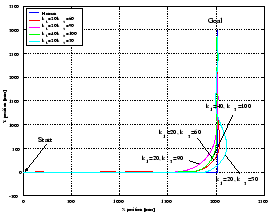
In Fig.8(b), both
increases, the trajectory of the robot after turning becomes oscillatory.
In Fig.8(b), both ![]() and
and ![]() are changed. The performance as a result of a right-angled turn
is improved by adequately setting up
are changed. The performance as a result of a right-angled turn
is improved by adequately setting up ![]() and
and ![]() . The adequate parameters are tuned experientially by performing
this simulation so that the mobile robot does not stray from the trajectory
of the human and the motion of the mobile robot does not oscillate.
. The adequate parameters are tuned experientially by performing
this simulation so that the mobile robot does not stray from the trajectory
of the human and the motion of the mobile robot does not oscillate.