

RESEARCH
海中グループ
自律型海中ロボット(AUV)による海中探査
コンピュータと各種センサを搭載したロボットが水中での3次元位置を推定する方法や全自動で探査するためのナビゲーション技術を研究します.
陸上グループ
複数ロボットによる環境モニタリング
複数のロボットが多地点で観測した映像などの情報からロボットや人の位置を正確に推定し,環境の変化を認識するための要素技術を研究します.
空域グループ
無人航空機(UAV)とAUVの連携による海中探査
UAVとAUVが連携するための協調探査方法やUAVが撮影した映像やセンシング情報から海の状態を自動認識する方法を研究します.
海中環境の可視化
海中ロボットがカメラや音響センサを用いて海中環境のデジタル地図・空間を構築して可視化する方法を研究します.
ロボットによるデジタル地図作成
周囲の距離を計測するLiDARやカメラの情報をもとに自動運転や環境認識に欠かせないデジタル地図を構築する方法を研究します.
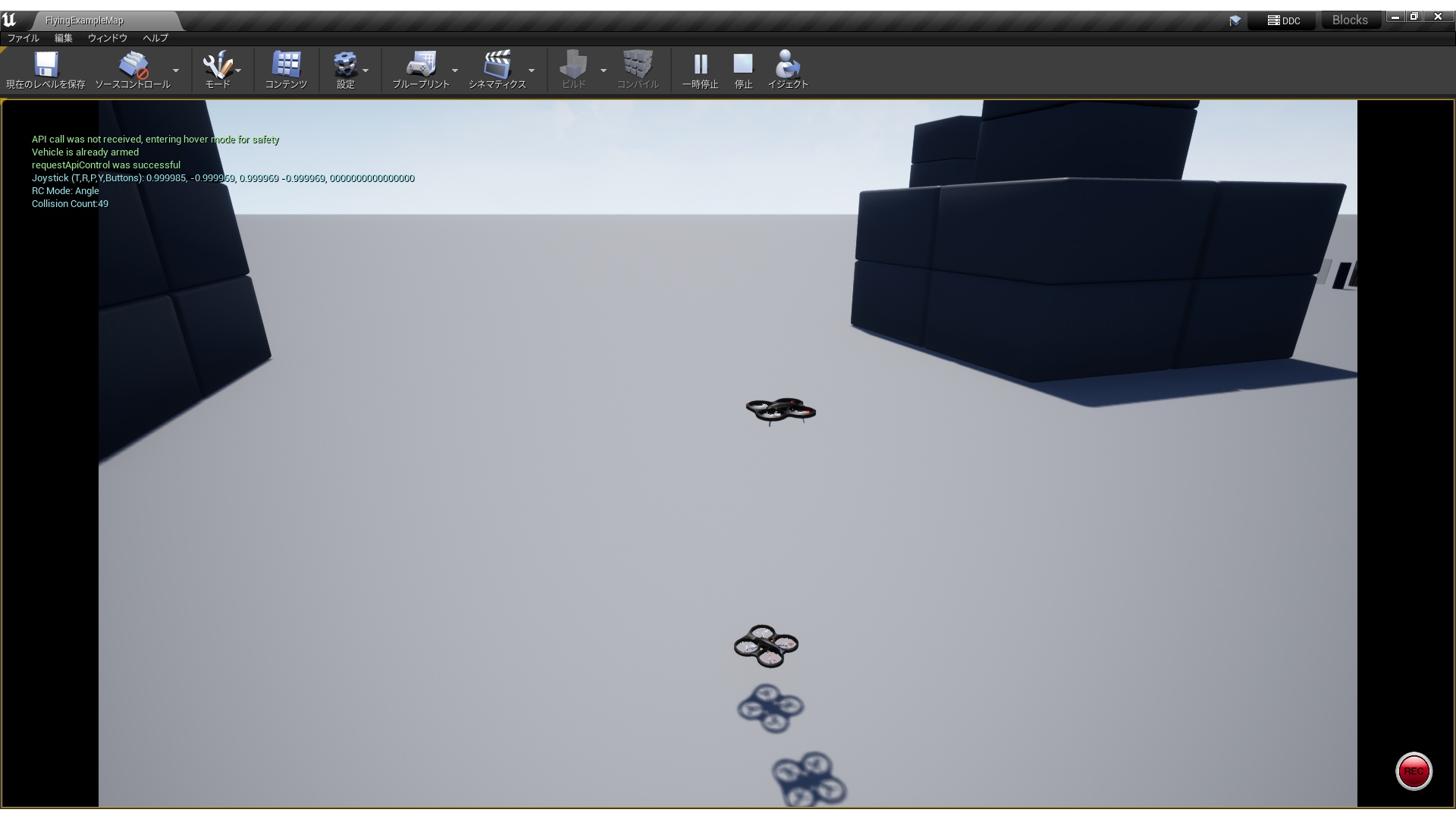
UAVシミュレータを用いた自動飛行
オープンソースのシミュレータを用いてUAVの自動飛行を支えるナビゲーション技術を研究します.
MEMBERS
PUBLICATIONS
学術誌論文
- T. Matsuda, Y. Kuroda, R. Fukatsu, T. Karasawa, M. Takasago, K. Morishita, "A mutual positioning relay method of multiple robots for monitoring indoor environments," International Journal of Advanced Robotic Systems, 19(5), pp.1-13, 2022.9.
- Y. Weng, T. Matsuda, Y. Sekimori, J. Pajarinen, J. Peters, T. Maki, "Pointing Error Control of Underwater Wireless Optical Communication on Mobile Platform," IEEE Photonics Technology Letters, 34(13), pp.699-702 2022.7.
- T. Matsuda, K. Fujita, Y. Hamamatsu, T. Sakamaki, T. Maki, "Parent–child‐based navigation method of multiple autonomous underwater vehicles for an underwater self‐completed survey," Journal of Field Robotics, 39(2), pp.89-106, 2022.3.
- T. Matsuda, "Low-Cost High-Performance Seafloor Surveying by Multiple Autonomous Underwater Vehicles," Applied Ocean Research, 117, pp.1-14, 2021.12.
- T. Matsuda, R. Takizawa, T. Sakamaki, T. Maki, "Landing Method of Autonomous Underwater Vehicles for Seafloor Surveying," Applied Ocean Research, 101, pp.1-17, 2020.8.
- T. Matsuda, T. Maki, K. Masuda, T. Sakamaki, "Resident autonomous underwater vehicle: Underwater system for prolonged and continuous monitoring based at a seafloor station," Robotics and Autonomous Systems, 120, pp.1-19, 2019.10.
- Y. Yokota, T. Matsuda, "Underwater Communication Using UAVs to Realize High-Speed AUV Deployment," Remote Sensing, 13(20) pp.1-11 2021.10.
- T. Matsuda, T. Maki, T. Sakamaki, "Accurate and Efficient Seafloor Observations With Multiple Autonomous Underwater Vehicles: Theory and Experiments in a Hydrothermal Vent Field," IEEE Robotics and Automation Letters (RA-L), 4(3), pp.2333-2339, 2019.7.
- T. Matsuda, T. Maki, Y. Sato, T. Sakamaki, "Experimental Evaluation of Accuracy and Efficiency of Alternating Landmark Navigation by Multiple AUVs," IEEE Journal of Oceanic Engineering, 43(2), pp.288-310, 2018.4.
- T. Maki, Y. Sato, T. Matsuda, K. Masuda, T. Sakamaki, "Docking Method for Hovering-Type AUVs Based on Acoustic and Optical Landmarks," Journal of Robotics and Mechatronics, 30(1), pp.55-64, 2018.2.
- T. Matsuda, T. Maki, Y. Sato, T. Sakamaki, T. Ura, "Alternating landmark navigation of multiple AUVs for wide seafloor survey: Field experiment and performance verification," Journal of Field Robotics, 35(3), pp.359-395, 2017.9.
- T. Matsuda, T. Maki, Y. Sato, T. Sakamaki, T. Ura, "A cooperative navigation method of multiple AUVs for wide seafloor survey -first performance evaluation in sea environments-," Marine and Underwater Science and Technology, 1(1), pp.11-22, 2015.5.
- T. Matsuda, T. Maki, T. Sakamaki, T. Ura, "State Estimation and Compression Method for the Navigation of Multiple Autonomous Underwater Vehicles With Limited Communication Traffic," IEEE Journal of Oceanic Engineering, 40(2), pp.337-348, 2015.4.
- Y. Sato, T. Maki, A. Kume, T. Matsuda, T. Sakamaki, T. Ura, "Path Replanning Method for an AUV in Natural Hydrothermal Vent Fields: Toward 3D Imaging of a Hydrothermal Chimney," Marine Technology Society Journal, 48(3), pp.104-114, 2014.5.
- T. Maki, T. Matsuda, T. Sakamaki, T. Ura, J. Kojima, "Navigation method for underwater vehicles based on mutual acoustical positioning with a single seafloor station," IEEE Journal of Oceanic Engineering, 38(1), pp.167-177, 2013.1.
- T. Matsuda, T. Maki, T. Sakamaki, T. Ura, "Performance Analysis on a Navigation Method of Multiple AUVs for Wide Area Survey," Marine Technology Society Journal, 46(2), pp.45-55, 2012.3.
その他を開く
学会発表
- Y. Sekimori, Y. Weng, T. Matsuda, Y. Noguchi, C. Kawamura, T. Maki, "Acoustic Passive BEDD Self-localization for A Fleet of AUVs: A Sea Experiment Validation," OCEANS 2022: Hampton Roads, 2022.10.
- Y. Weng, T. Matsuda, Y. Sekimori, J. Pajarinen, J. Peters, T. Maki, "Time Synchronization Scheme of Underwater Platforms Using Wireless Acoustic and Optical Communication," IEEE/OES Autonomous Underwater Vehicles Symposium (AUV): Singapore, 2022.9.
- Y. Sekimori, T. Matsuda, T. Maki, "Bearing-Only Aided Bearing, Elevation, Depth Difference Self-localization for Multiple AUVs," OCEANS 2022: Chennai, 2022.2.
- Y. Weng, T. Matsuda, Y. Sekimori, J. Pajarinen, J. Peters, T. Maki, "Sim-to-Real Transfer for Underwater Wireless Optical Communication Alignment Policy between AUVs," OCEANS 2022: Chennai, 2022.2.
- T. Matsuda, Y. Hamamatsu, K. Fujita, T. Sakamaki, T. Maki, "Experimental Results of Ship-free Underwater Survey Method of Multiple Autonomous Underwater Vehicles," OCEANS 2021: San Diego-Porto, 2021.9.
- Y. Sekimori, H. Horimoto, Y. Noguchi, T. Matsuda, T. Maki, "Scalable Real-time Global Self-localization of Multiple AUV System using Azimuth, Elevation, and Depth Difference Acoustic Positioning," OCEANS 2021: San Diego-Porto, 2021.9.
- K. Fujita, T. Matsuda, T. Maki, "Bearing Only Localization for Multiple AUV with Acoustic Broadcast Communication," The 19th International Conference on Control, Automation and Systems (ICCAS 2019), pp.1371-1376, 2019.10.
- T. Matsuda, T. Maki, T. Sakamaki, "Navigation Method of Multiple AUVs with Velocity Control for Stable Positioning and Communication among AUVs," OCEANS 2019: Marseille, pp.1-5, 2019.6.
- Y. Hamamatsu, T. Matsuda, T. Sakamaki, T. Maki, "Short Range Tracking Method of Underwater Vehicles Based on Vision," OCEANS 2019: Marseille, pp.1-5, 2019.6.
- T. Matsuda, T. Maki, K. Masuda, T. Sakamaki, K. Ohkuma, "Port Experiments of the Docking and Charging System Using an AUV and a Seafloor Station :Towards Long-term Seafloor Observation," IEEE/OES Autonomous Underwater Vehicles Symposium (AUV): Porto, pp.1-5, 2018.11.
- T. Matsuda, T. Maki, T. Sakamaki, "Multiple AUV Navigation Based on a Single High-performance AUV for Accurate and Efficient Seafloor Survey : Sea Experiments with 3 AUVs," OCEANS - MTS/IEEE KOBE TECHNO-OCEANS (OTO), pp.1-7 2018.5.
- T. Matsuda, T. Maki, M. Sangekar, "Intelligent seafloor survey by cooperative multiple AUVs based on real-time analysis of a bathymetry map," OCEANS '17 MTS/IEEE Anchorage pp.1-5 2017.9.
- T. Matsuda, T. Maki, Y. Sato, T. Sakamaki, "Accurate and efficient survey of the seafloor by multiple AUVs using alternating landmark navigation - Sea experiments using three AUVs," OCEANS 2017 - Aberdeen 2017 pp.1-10 2017.6.
- Y. Sato, T. Maki, K. Masuda, T. Matsuda, T. Sakamaki, "Autonomous docking of hovering type AUV to seafloor charging station based on acoustic and visual sensing," 2017 IEEE Underwater Technology (UT), 2017.2.
- T. Matsuda, T. Maki, Y. Sato, T. Sakamaki, "Sea Experiments and Tank Tests on Alternating Landmark Navigation Using Multiple AUVs-Towards Accurate and Efficient Survey of Seafloor by AUVs," IEEE/OES Autonomous Underwater Vehicles Symposium (AUV):Tokyo, pp.213-221, 2016.11.
- Y. Sato, T. Maki, H. Mizushima, T. Matsuda, T. Sakamaki, "Evaluation of Position Estimation of AUV Tri-TON 2 in Real Sea Experiments," OCEANS 2015 - GENOVA, pp.1-6, 2015.5.
- T. Matsuda, T. Maki, Y. Sato, T. Sakamaki, "Performance Verification of the Alternating Landmark Navigation by Multiple AUVs through Sea Experiments," OCEANS 2015 - GENOVA, pp.1-9, 2015.5.
- Y. Sato, T. Maki, T. Matsuda, T. Sakamaki, "Detailed 3D Seafloor Imaging of Kagoshima Bay by AUV Tri-TON2," 2015 IEEE Underwater Technology (UT), pp.1-6, 2015.2.
- T. Maki, Y. Sato, T. Matsuda, R. T. Shiroku, T. Sakamaki, "AUV Tri-TON 2: An intelligent platform for detailed survey of hydrothermal vent fields," 2014 IEEE/OES Autonomous Underwater Vehicles Symposium (AUV), pp.1-5, 2014.10.
- T. Matsuda, T. Maki, Y. Sato, T. Sakamaki, "Cooperative Navigation Method of Multiple Autonomous Underwater Vehicles for Wide Seafloor Survey-Sea Experiment with Two AUVs," OCEANS 2014 - TAIPEI, pp.1-9, 2014.4.
- T. Matsuda, T. Maki, T. Sakamaki, T. Ura, "Primary Experimental Results of the Navigation Method of Multiple Autonomous Underwater Vehicles," IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2013, pp.2650-2657, 2013.11.
- T. Matsuda, T. Maki, T. Sakamaki, T. Ura, "State Estimation of Multiple Autonomous Underwater Vehicles for Wide Area Survey of Seafloor," 2013 MTS/IEEE OCEANS - BERGEN, pp.1-9, 2013.6.
- T. Maki, R. T. Shiroku, Y. Sato, T. Matsuda, T. Sakamaki, T. Ura, "Docking Method for Hovering Type AUVs by Acoustic and Visual Positioning," 2013 IEEE International Underwater Technology Symposium (UT), pp.1-6, 2013.3.
- Y. Sato, T. Maki, A. Kume, T. Matsuda, T. Sakamaki, T. Ura, "Field Experimental Results of Path Re-planning Method for an AUV to Visualize Complicated Surface in 3D," 2013 IEEE International Underwater Technology Symposium (UT), pp.1-7, 2013.3.
- T. Matsuda, T. Maki, T. Sakamaki, T. Ura, "Toward wide seafloor surveys using multiple autonomous underwater vehicles," 2013 IEEE International Underwater Technology Symposium (UT), pp.1-9, 2013.3.
- T. Maki, Y. Sato, T. Matsuda, A. Kume, T. Sakamaki, T. Ura, "AUV Tri-TON - A Hover-Capable Platform for 3D Visualization of Complicated Surfaces," 2013 IEEE International Underwater Technology Symposium (UT), pp.1-6, 2013.3.
- T. Matsuda, T. Maki, T. Sakamaki, T. Ura, "State Estimation of Multiple AUVs with Limited Communication Traffic," 2012 OCEANS: Hampton Roads, pp.1-10, 2012.10.
- T. Matsuda, T. Maki, T. Sakamaki, T. Ura, "Alternant Landmark Positioning: Towards Wide Area Observation by Multiple AUVs," OCEANS 2012: YEOSU, pp.1-10, 2012.5.
- T. Matsuda, T. Maki, T. Sakamaki, T. Ura, "Large area navigation method of multiple AUVs based on mutual measurements," OCEANS 2011: Kona, pp.1-9, 2011.9.
- T. Maki, T. Matsuda, T. Sakamaki, T. Ura, "AUV navigation with a single seafloor station based on mutual orientation measurements," 2011 IEEE Symposium on Underwater Technology, UT'11 and Workshop on Scientific Use of Submarine Cables and Related Technologies, SSC'11, pp.1-7, 2011.3.
その他を開く
PROJECTS
- 複数の自律型海中ロボット(AUV)の協調による海中探査
- 東京大学との共同研究
- 複数ロボットの協調による屋内モニタリング
ACCESS / CONTACT
-
研究室所在地
〒214-8571
神奈川県川崎市多摩区東三田1-1-1
第2校舎6号館6404お問い合わせは tmatsuda (at) meiji.ac.jp までご連絡ください.
(at) は@で置き換えてください. -