| |
| |
ステレオPIV1.はじめに 画像処理流速計(PIV, Particle Image Velocimetry)は流体速度の多点同時計測法として普及してきており、重要な流体計測法として従来の点計測手法と並んで認知されつつある。特に、最も普及しているカメラ1台を用いた2成分PIV (2CPIV, Two-Component PIV)は比較的簡単な計測システムとアルゴリズムによって二次元面内の速度二成分を計測可能とするもので、最近は大学や企業の研究室などでよく見かけられる。一方、2CPIVにカメラをもう1台加えてトレーサ粒子をステレオ視することで、二次元面内における速度三成分を計測するステレオPIV(ここでは2CPIVに対比して3CPIVと呼ぶことにする)は、従来のPIVシステムを発展させることで比較的容易にシステムを構築できるため、次世代PIVとして注目されている。ここでは、このステレオPIVの開発と応用を解説する。 2.計測方法 2.1 3CPIVの原理 3CPIVではトレーサ粒子を懸濁した流動場にパルスシート光を照射し、トレーサ粒子からの散乱光を2台のCCDカメラで撮影する。パルスシート光は短い時間間隔dtで2回照射し、それぞれの散乱光をCCDカメラの時間的に連続する2フレームに撮影する。図1は可視化された粒子画像の例である。 
図1 粒子画像の例;時刻t=0(左)、時刻t=8ms(右) 図2はシート光面を横切る断面で移動する粒子とCCD素子面に結像される粒子像の幾何学的関係を示している。ここで、シート面中央部を原点とする物理座標P、CCD(L)面およびCCD(R)面における画像座標XL、XRをそれぞれ定義する。物理座標の位置Pにある粒子がdt後にP'へ移動したとき、CCD(L)面に結像される粒子像は第1フレームの画像座標XLから第2フレームのXL+dXLへ、CCD(R)面に結像される粒子像は画像座標XRからXR+dXRへそれぞれ移動する。ここで、点XL+dXLおよびXR+dXRには物理座標における直線AC およびBD上の全ての点がそれぞれ投影される。よって、画像座標における任意の点とそれに対応する物理座標における直線の関係が後述する位置校正により既知であれば、点XL+dXLおよびXR+dXRに対応する直線ACおよびBDがそれぞれ求まり、さらに、この2直線の交点を求めることで点P'が定まる。ここで、2直線は種々の誤差要因により完全に交わることはあり得ないので、その代わりに2直線の最短距離を結ぶ直線、すなわち2直線に互いに垂直に交わる直線を求め、その2交点の中間点をP'と定義する。最後に、点Pにおける速度ベクトルVは
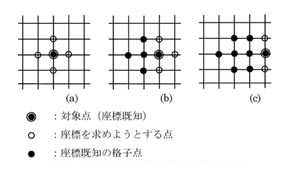
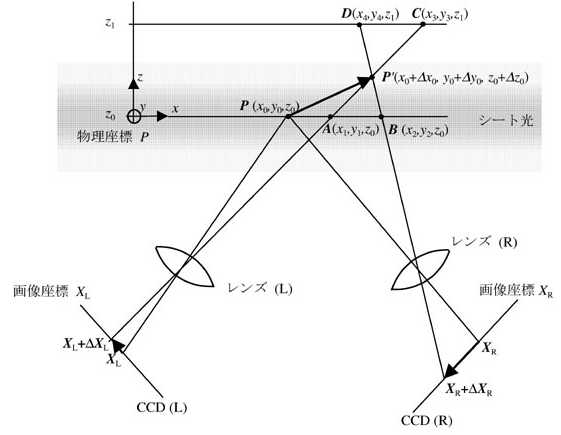 図2 パルスシート光内の粒子位置とCCD素子面に結像される粒子像との関係 2.2 位置の校正 画像座標の任意の点とそれに対応する物理座標における直線の関係は、AB面およびCD面に図3に示すような校正板を挿入し、その画像から画像座標と物理座標を対応づける写像関数を作成する。校正板は既知の間隔の格子線を描いたものであり 、アームを介して微動送り台に固定されている。校正板には基準となる点(基準点)を示すためのマークを書き込んでおき(図3参照)、このマーク近傍(例えば右下)の格子点の位置を定めておく。  校正板  図3 校正板画像 校正手順は次のとおりである。 (1)校正板をシート光面中央(AB面, z=z0)に位置するよう設置する。 (2)校正板をCCDカメラで撮影し画像を記憶する(校正画像)。ここで、基準点が画像中にあるようにする。 (3)校正画像の格子点の画像座標を求めるために、あらかじめソフトウェア的に用意しておいた格子パタンと校正画像全体の相互相関関数を求め、相関係数のピーク位置を格子点とする。この段階で、各格子点の画像座標のリスト(格子点リスト)が出来上がる。
(5)画像座標と物理座標の対応リストから最小二乗法を用いて画像座標から物理座標への写像関数fx(X,Y)、fy(X,Y)およびその逆関数FX(x,y)、FY(x,y)のそれぞれの係数ai, bi, ci, diを求める。ここでx,yは物理座標、X,Yは画像座標であり、写像関数は3次多項式とした。
(6)つぎに、微動送り台を用いて校正板をその面と垂直な方向に移動する(CD面, z=z1)。移動量は画像中で格子点が10〜20画素移動するのに相当する程度であり、後述の例では2mmである。 (7)上記(2)〜(5)と同様にしてz=z1における写像関数を求める。 以上の操作により、画像における任意の点に対応するz=z0およびz=z1面における物理的な位置が得られることになる。 2.3 カメラ配置 カメラの配置方法は図5に示すように3種類の方法が考案されている4。共にシート面上のほぼ同一領域を2台のカメラで異なる角度から撮影しようとするものである。(a)傾斜配置は撮像面(CCD素子面)とレンズ主平面が平行、すなわち通常のCCDカメラにレンズをマウントしたもので、最も簡単な方法である。しかし、撮像-レンズ主平面とシート面が平行でないため、撮像面全体にわたってピントを合わせることが困難であることが大きな欠点である。(b)シフト配置は撮像-レンズ主平面とシート面が平行であるためピントは合う。しかし、レンズ主軸に光軸が平行でないために収差の影響が大きく現れる。また、複数レンズの場合には主軸と光軸の角度を大きくとることが出来ない。(c)シャインフラグ配置は撮像面、レンズ主平面、シート面の延長線が一点で交わるように配置するもので、撮像面全体にわたってピントを合わせることが出来る。市販のシステムはこの形式を採用しているものが多い。ただし、レンズ主軸とカメラ主軸に角度を持たせるために図6のような機構が必要である。ここで、カメラは回転ステージによって回転可能であり、カメラとレンズの間は蛇腹で覆うことで外光を遮る。カメラとレンズの距離も可動式である。なお、図3の校正板画像はシャインフラグ配置によって撮影されたものである。  図5 カメラ配置  図6 カメラ-レンズのマウント機構 3.応用例:平面噴流 3CPIVの応用例として平面噴流の計測例を以下に紹介する。作動流体である水は図7(左)に示すような二次元ノズルによってノズル上部の透明な矩形タンクへ流出し、平面噴流を形成する。ノズル出口幅B=30mm、奥行き(スパン方向)L=300mmであり、ノズル出口における平均流速V0=80mm/s、このときのレイノルズ数Re=V0B/v=2800である。図7に示すように、ノズル出口部には矩形スロット(1mm x 4mm)がスパン方向に60個×2列並んでおり、各スロットはビニルチューブを介して4台のスピーカー(A0,A1,B0,B1) に接続されている。各スピーカには正弦波電圧を加え、スピーカA0,B0とA1,B1の位相差をaとする。これにより、各スロットから吸い込み/吹き出しによる擾乱を噴流初期せん断層に与えることが可能でり、位相差a10とすることで擾乱はスパン方向に周期的なものとなる。 
 図7 平面噴流流路とカメラ・レーザシートの配置(左)、ノズル部詳細(右)  図8 測定部とカメラ、プリズム全景 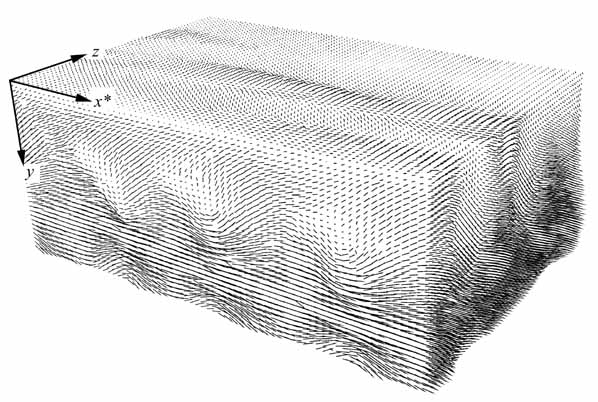 図9 速度ベクトルの三次元表示。x*方向は時間軸。
 とする。こうして得られた渦度絶対値 の等値面を図10に示す。z軸に平行なせん断渦がx*方向に並んでおり、さらにx*-y面にほぼ平行な縦渦、いわゆるリブ構造が確認できる。3CPIVが渦の三次元構造の推定に有効であることが示された。 とする。こうして得られた渦度絶対値 の等値面を図10に示す。z軸に平行なせん断渦がx*方向に並んでおり、さらにx*-y面にほぼ平行な縦渦、いわゆるリブ構造が確認できる。3CPIVが渦の三次元構造の推定に有効であることが示された。
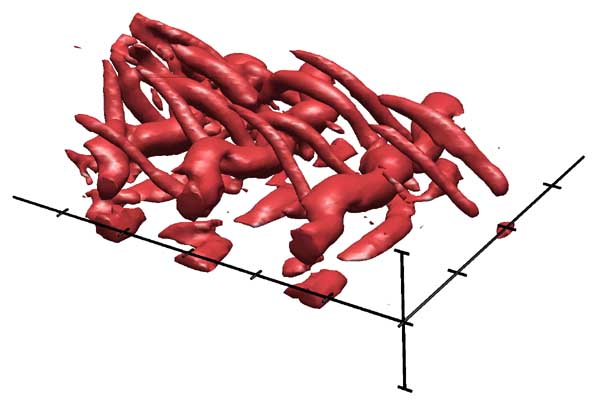 図10 渦度等値面 Sakakibara, J., Nakagawa, M., Yoshida, M., 2004, "Stereo-PIV study of flow around a maneuvering fish", Experiments in Fluids, Vol.36, pp.282-293. Prasad, A.K., Adrian, R.J., 1993, "Stereoscopic particle image velocimetry applied to liquid flows", Experiments in Fluids, 15, pp.49-60. Willert, C., 1997, "Stereoscopic digital particle image velocimetry for application in wind tunnel flows, Meas. Sci. Technol., 8, pp.1465-1479. 西野耕一、清水 勲、佐賀徹雄、牛島 省、鈴木雄二、岡本孝司、1999、"最新情報:3次元PIV"、可視化情報学会講習会テキスト、VSJ-PIV-S2 "熱流体の新しい計測法"、(社)日本機械学会編、養賢堂 Lawson, N.J., Wu, J., 1997, "Three-dimensional particle image velocimetry: experimental error analysis of a digital angular stereoscopic system", Meas. Sci. Technol., 8, pp.1455-1464. Soloff, S.M., Adrian, R.J., Liu, Z.C., 1997, "Distortion compensation for generalized stereoscopic particle image velocimetry", Meas. Sci. Technol., 8, pp.1441-1454. |




 ,
, ,
,