機械制御システム研究室の研究内容
学会発表したものだけを紹介します.日本設計工学会 春期・秋期大会研究講演会,日本ロボット学会 学術講演会,日本機械学会 ロボティクス・メカトロニクス講演会などで報告しています.
古いものを上に書いてありますが,古い年度のものからご覧いただくと,少しずつ改善が進んで継続されているテーマがあることを見ていただけるかと思います.
学会発表されたものは公知となっておりますので,研究担当者(学会講演者)の氏名のみ記載します.
2014年度
本研究室は2011年に開設されました.2011年はご存じ東日本大震災の年で,春学期の授業は1ヶ月ほど開始が遅れ,かつ研究室の立ち上げもあり初期メンバーの尽力の結果が出てやっと学会発表に漕ぎ着けたものです.
2013年度(2014年3月)修了の大学院生が大変頑張ったので,本学も中野に新校舎ができたこともあり,ここを会場とした学会にて成果を報告しました.
重力補償機能を有した7自由度ロボットアーム
|
ロボットには強力なアクチュエータ(モータなど)が必要ですが,例えば筋肉に比べてモータは重い割に力(トルク)が不十分です.(筋肉は同じ質量でモータの10倍くらいの出力があります.出力重量比といった評価をします.)
そのため,ロボットの自重を支えるだけでも限られた力(トルク)を無駄にしてしまう問題があります.そこで,自重分をばねに任せれば,モータは目的の動作のために使うことができるのです.
アームの姿勢が変わってもその姿勢で釣り合うような機構を重力補償機構と呼ばれており,これをロボットアームに組み込むことを考えました.
ロボットを人間の傍で利用するには安全上,モータの出力を低く抑えておく方がよいため,この原理が有効であることに加え,人間に近い腕の関節配置はロボットで示すと7関節となりますので,この関節構成に先の重力補償の原理を適用するための設計上の工夫をしたのがこの研究の主意です.
関節が多いと多様な姿勢を選択できますが,腕が人間らしい姿勢になった方がより親和性が高いだけでなく,近くの人間にとってもロボットの動作が予測しやすくなるため,安全になると考えています.
モータ:コマンド型サーボモータ
関節自由度:7
|
 |
| 担当者:横山(2013年度 修了) |
2015年度
2014年度修了の修士の学生が修士論文にまとめた内容が急に伸びてきて良い成果となったので研究室として発表しました.
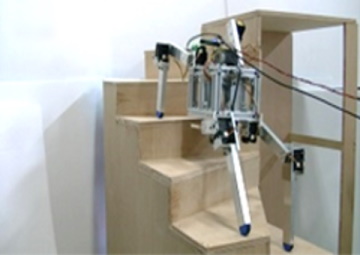
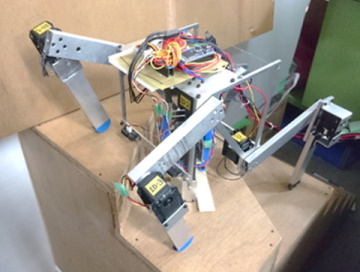
まわり階段昇降可能な4+1脚型歩行ロボット
|
住宅や施設など多くの建物で見掛ける[まわり階段]ですが,脚型ロボットにとって難所なのです.
建物設計上は省スペース化につながり,人間にとっては万一踏み外してもまわり階段のところで止まるというメリットはあるのでこれが無くなるとは考えにくいものです.
車輪やクローラ型ロボットにとって,内側と外側の勾配が異なり,しかも段差の連続であるため,移動は困難です.そこで,このような場所には脚式ロボットが適していると考え,はじめは4脚ロボットを検討しました.足を踏み換えることによって,その場で旋回もできますが,まわり階段のような螺旋状の勾配のある移動面の場合,前脚を折り曲げた姿勢となるため,膝先が壁面に接触する可能性が大きく,そのための制御の戦略に工夫が必要だと分かりました.
そこで,胴体中央下部に上下伸縮と旋回だけを行う脚を追加する機体を考案したのです.まわり階段では4脚で上った後,追加の脚を伸ばして支え,4脚を折りたたんで旋回するということを繰り返す動作を行います.動作シーケンスが簡単になることが特徴のロボットです.
モータ:コマンド型サーボモータ
関節自由度:10(1脚あたり2関節×4,中央支持脚2自由度)
|
 |
| 担当者 笠井(2014年度 修了) |
2016年度
2015年度修了の修士の学生が修士論文にまとめた内容が急に伸びてきて良い成果となったので研究室として発表しました.
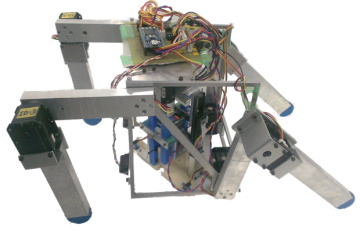
まわり階段昇降可能な4+1脚型歩行ロボット(改善)
脚式ロボットは概してエネルギ効率が悪いと昔から議論されています.その理由は,自重を支持するためにモータに電力を供給する必要があるということに起因しています.
解決には,自重を支持するときにエネルギを消費しない仕組みを用意すればよく,中心支持脚が支持して停止している場合にロックできる機構を追加しました.ロックのためにさらにモータを追加したのではなく,脚上下伸縮用モータの動きを連動して利用しているところがこのロボットの大きな特徴です.
センサは,近接距離センサを用いているだけですが,これだけでも階段を認識でき,直線部-屈曲部-直線部の階段を通過することができました.近接距離センサの特性を補うための動作を歩行シーケンスに入れていることで確実な動作を実現します. |
 |
| 担当者 村尾(2016年度 修了) |
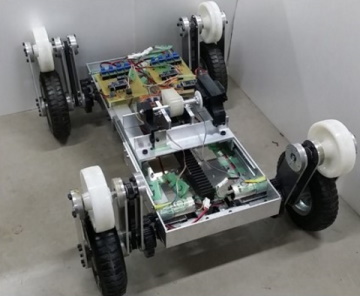
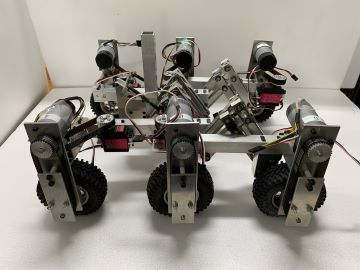
階段昇降可能な段に適応する車輪と伸縮型車輌ロボット
階段を登るロボットといえば,荷物搬送用のゴム・クローラ型が馴染み深いと思います.クローラは建設機械で用いられる位で,荒れ地でも走行可能なのは自明ですが,不規則で柔らかい,そして,多少荒らしても問題ない路面であるからこそ適していると考えられます.
屋内の階段は,規則的な形状で固く,もちろんこすれるような移動は避けたいところですので,クローラが最適とも言えないのではないかと考えました.
重量物が対象となると,脚以外の選択肢となり,車輪を用いますが,摩擦ではなくて形状の効果で確実に段を掴んで登るために,車輪外周に突起を付けました.この突起は,可動式で段に滑り込むように接地し,接地した後は,爪によって噛み込むことで確実な動作が可能となります.段の高さは異なりますが,一般的な階段であれば,受動的に適応できるよう,設計しているところがこのロボットの特徴です.
とてもゆっくりで,1階登るのに2~3分は掛かりますが,安定した確実な移動が可能となりました.
4号館には階段しかないのですが,重量物(工作機械など)を運び上げるのは一苦労で,小型フライス盤を2人がかりで運び上げようとして,あまりに重すぎて大変な目※にあった上,しかも1~2階で断念し,2~3階は手助けを頼んで4人で運び上げた経験がヒントになって考えた研究です.
モータ:DCモータ×4
制御:速度比例制御
段鼻間適応:原付用スプリング&ダンパー
※業務・実務上は持ち上げて良い重量が限られています.重量物を運ぶ特殊な技能を持っていない限り,極度に重いものを運んではいけないと考える必要があります. |
 |
掲載論文
加藤恵輔, 中村祐介, 長谷川一樹, 根崎雄太, "移動支援と運搬作業支援を行う階段昇降移動ロボットの設計・開発", 設計工学, 55.2(2020),117-128.
担当者 中村(2014年度 修了),長谷川(2015年度 修了),根崎(2018年度 修了) |
段差昇降可能な公転車輪を有する車輛ロボット
荷物台車など車輪を使った台車は20mmくらいの段差※の乗り越えに難渋するくらいですので,車輪にとって段差移動は課題となっています.脚は段差移動を得意としていますが,制御が複雑でエネルギ消費が多く,多くのモータが必要(4脚であれば最低12個)となるため,できる限り車輪で解決できないかについて考えました.
車輪と脚を組み合わせたものを作ればよいですが,モータを必要以上に増やさないよう,1輪あたり1自由度のみの追加とし,脚の先には小さい車輪を付けてちょうど主車輪に対して公転するように動かす方式を考案しました.主車輪と公転車輪は連動しており,周速(接線方向)が等しくなるようにベルトで駆動しています.段差を検出する距離センサを装備し,段差に差し掛かったら,公転車輪を公転させ,段差に引っ掛けてよじ登るように段差に乗り上げる動作となります.段差の検出ができれば,シーケンス制御(予め決めておいた動作)で昇降できるのが特徴となっています.
ある展示会でこのロボットを展示したところ,車椅子に乗った下肢が麻痺した方より,是非実用化を目指して欲しい,との言葉をいただいております.
モータ:DCギヤードモータ×8
制御:車輪角速度制御,公転アーム角度制御
センサ:段エッジ検出用距離センサ
※道路の縁石の低くなったところはこの値までと決められていますが,台車,ベビーカー,歩行支援のカート,電動車椅子の前輪など不安定な挙動を目にしたことがあるかと思います.あの段差でも車輪にとっては問題があると考えています. |
 |
| 担当者 長岡(2015年度 修了),平松(2017年度 修了),石塚(2018年度 修了) |
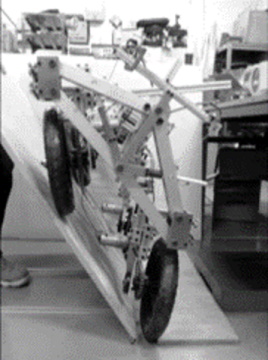
片斜面適応可能な車輛型ロボット
移動ロボットが急斜面を登るといっても,傾斜のほか,移動面の脆弱さなど地形としての特性を考える必要があります.また,登り切らずに途中で止まっていられることも重要です.従って,高出力と慣性力を背景とした移動方法は,傾斜面を登り切るという意味では相当な性能を有したものもありますが,斜面の途中で確実に止まることは概して困難です.
脚式ロボットは斜面を自在に移動することに適していると言え,脆弱な地面への沈み込みを防ぐ脚の工夫ができれば,自在な移動が可能となります.クローラは,接地面積の大きさが利点で確実な移動ができますが,傾斜方向から外れた移動は苦手な場合があります.車輪の場合,先に述べたように慣性力任せで駆け抜けられる場合もありますが,途中で止まる,あるいはゆっくり確実に登るには,車輪を工夫する必要があります.それでも車輪型の利点は簡潔さであるため,これを利用できないかを試したものが,この研究です.
斜面を自在に走るには,いわゆる登坂能力だけでなく,片斜面方向(等高線方向)にも走行できることが必要であり,これができればかなり安定した移動が可能となります.横方向への安定性を確保するためのサスペンションを考え,自動車のようなロールセンターの位置とは全く異なり,各車輪は車体よりも外側の回転中心を基準に傾く構造となります.車輪は谷側に突っ張るような姿勢となるため,転倒しにくくなる性質を得た機構を考えました.
実のところ,スキーの山足・谷足(外足,内足)の使い方から思い付いた(スキーでは外側を突っ張るのはあまりよくない動作ではあります)のと,かなり古いコンセプトカーで,車輪の対地姿勢を変えて旋回性能を上げるというアイディアをヒントにしています.
モータ:DCギヤードモータ×5
制御:車輪角速度制御,傾斜適応角度制御
センサ:2軸加速度センサ(傾斜検出用) |
 |
掲載論文
加藤恵輔, 吉尾一平, 相田利博, "傾斜適応して片斜面走行可能な車輪型不整地移動ロボットの研究", 設計工学, 55.10(2020), 629-644.
担当者 吉尾(2015年度 修了),相田(2017年度 卒業)
日本設計工学会 2020年度 論文賞受賞 |
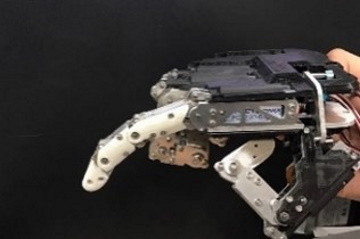
摘まみ上げ機能を実現する巻き取り機構を有した3指ハンド
ロボットハンドの研究は古く,ロボットが工業化した当初から開発されていました.ロボットや制御,知能関連の研究者によって盛んに取り組まれ,現在も研究されている分野です.画像処理技術の進歩により,対象物の形状や位置や姿勢に合わせて指を動かせばよいのですが,これが意外と難しいのです.もちろん,高度な技術があれば,簡単とも言えるのですが,単に摘み上げるという動作に対して,大袈裟なシステムとなる面は否めないので,これを何とか簡単にできないかと考えたものです.負圧を用いて吸着するなどのアイディアもありますが,指の角度などの状態が把握しやすく制御が簡単なのはサーボモータを利用することだと考えました.ところで,指の脂がなくなってカサカサしているとき,小さなものや紙を摘み上げにくいと感じたことはありませんか.この時,引っ張り込むような動きができれば簡単ではないかという発想から,指先にベルトを付けてコンベアのように対象物を引き込んで摘み上げる方式を発案しています.対象物の大きさに合わせて,程よい力で挟んで,ベルトを回せばよいだけなので,難しい制御は必要ありません.あるいは,布などは,軽く押し当てれば巻き込んでくれるので,動作がとても簡単に実行できます.
人間の手はよくできていますが,多くの筋肉と腱を用い,関節自由度もよく,また,筋肉そのものの特性が優れていて,細かく分布した知覚系があり,これを完全に再現するのは極めて困難であり,まったく異なる構造で把持機能を実現するのも有効かと考えています. |
 |
| 担当者 山森(2014年度 卒業),鈴木(2012年度 卒業) |
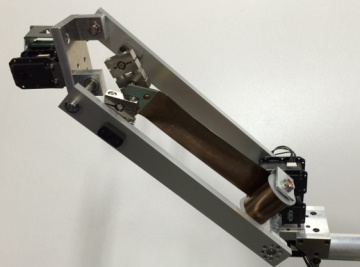
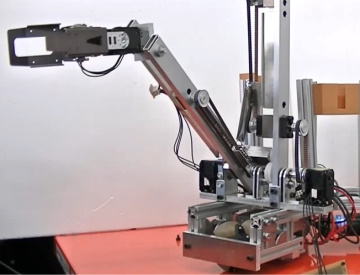
定荷重ばねを利用した重力補償機構を有したロボットアーム
ご存じの通り,ばねは変位した分だけ力が大きくなりますが,あまり大きなストロークを得ることができません.一方,大きなストロークが得られるゼンマイのようなばねがあり,定荷重ばねと呼ばれています.重力補償機構にこの定荷重ばねが使えないかについて試すために始めた研究です.
アームの場合,姿勢によって補償すべき量が変化するため,これを考慮した機構を考える必要があります.この当時は,定荷重ばねで完全な補償をする方法は見付かりませんでしたが,少ない誤差で補償できるところまでは,設計の工夫(調整)により実現できました.
写真ではリンクの間の帯状のものが定荷重ばねです. |
 |
| 担当者 細野(2017年度 修了),三浦(2013年度 修了) |
視覚誘発電位を用いたロボットアームの制御
目に入ってくる光のフリッカ(ちらつき)が脳波を変調するという現象があります.例えば10Hzで点滅する光を見たときの脳波をフーリエ変換すると10Hzの信号が出てくるのです.この現象を視覚誘発電位といい,これを使えば,点滅光源を見るだけで,ロボットが動かせるのです.
このアイディアは学内の健康医工学研究室からいただいたもので,これを基にロボットに組み合わせられないかを検討したものとなっています.
とはいっても,認識できる周波数の範囲は限られており,また,脳波の変調とフーリエ変換の時間を考えると,あまり多くの種類のコマンドを扱えるとは言えないので,階層的なユーザインターフェイスでコマンド数を増やし,それぞれに制御シーケンスを割り当てることで,操縦ではなく,動作選択式のユーザインターフェイスを作ってロボットアームを動かしました. |
 |
| 担当者 小坂(2014年度 修了) |
不整地凹凸に適応する連接機構および車輌ロボット
車輪型ロボットが不整地で走行する場合,車輪が凹凸に乗り上げた際に駆動力が伝わらずに走行できなくなりますが,車体同士を連結すると,接地状態の良い車輛の駆動力を活用できる利点が得られます.ロボットの世界では蛇型がかなり昔に開発されましたが,多節型ロボットの可能性は大きく,車輛でも連結されている効果があるのではないかと考えたものです.
連結した際の力の伝わり方が重要で,単純な連結をすると,先頭部の接地状態が悪くなった際,後ろから押される力によって姿勢が崩れ,あらぬ方向に姿勢を変えて,狙い通りの走行ができない問題があります.そこで,2車輛が互いに曲がった姿勢となっている場合,まっすぐに復元する方向で押される方がよいと考え,交差リンクを連結機構に用いることを検討しました.この機構原理を用いると,例えば左に曲がっている際は,作用点が中心から左に移るため,後ろから強く押しても,姿勢が崩れにくくなる効果が期待できるというものです.ピッチ方向(前後の傾き)には課題を残しましたが,簡素な車輛でありながら,学内の不整地を走行させ,木の根などの凹凸にも適応できるような移動ができています. |
 |
| 担当者 小林(2015年度 修了) |
2017年度
まわり階段昇降可能な4+1脚型歩行ロボット(改善・機能拡充)
すでに提案しているロボットですが,前後脚の腿と脛の長さの比を調整しました.一見すると地味な変更ですが,これにより,まわり階段での足先の動作範囲を拡大することができ,また,モータに負担のかかる関節角(自重に対するモーメントアームが長くなる)を回避することができるなどの効果を得ることができました.ロボット開発において,目的に合わせた設計の最適化も重要な技術となっております.
また,中心の支持脚の足の接地多角形を大きくして安定化を図るため,まわり階段部では四角形から細長い台形に変形する機構を追加しています.この変形のためにモータは用いず,受動的に変形し,接地力が加わった際にはロックできる機能を付与しています. |
 |
| 担当者 笠井(2014年度 修了),村尾(2017年度 修了) |
階段昇降可能な公転車輪を有する伸縮型車輌ロボット(改良・機能拡充)
提案・試作した装置で,段差を登れるようになりましたが,[段差昇降可能な公転車輪を有する車輛ロボット]では段が登れるので,試しに胴体部に伸縮機能を付けたら階段を登れるのではないかと考えて開発したものです.
開発のきっかけは単純でしたが,思いの外,安定した階段昇降動作を実現することができました.伸縮式胴体は単に階段の間隔に合わせるためのものだけでなく,前後いずれかの車輪が止まっているため,安定した状態を作ることができ,簡潔な動作制御で階段を昇降できるのです.
階段は,踏面(ふみづら:水平方向)と蹴上(けあげ:高さ方向)から成りますが,登りでは蹴上への接触,下りでは踏面への接触を検知できれば,容易に動作可能という,簡単な動作が実現しました. |
 |
掲載論文
加藤恵輔, 平松大生, 長岡秀磨, 石塚岳, "自公転車輪と伸縮型車体を用いた段差・階段移動ロボットの開発
(機構設計と階段昇降実験)". 設計工学, 55,4(2020), 253-262.
担当者 長岡(2015年度 修了),平松(2016年度 修了),石塚(2018年度 修了) |
2018年度
まわり階段昇降可能な4+1脚型歩行ロボットのセンシングおよび制御(制御法の検討)
簡単なセンサだけで歩行が可能となることが最大の成果です.まわり階段部においては,三角部の二等分線に直行するように進路を正確に決める必要があり,蹴上の面を検出する必要があります.安価な赤外線反射型距離センサを用いることを試み,これを左右2組用いる方式を選択しました.
特定の条件(距離)では出力される電圧変化が小さいため,機体を意図的に揺動するように旋回させて感度の良い状態を作り出す動作を加えた工夫をしています.
これらの改良を以て,一連の開発を一通り終わらせました.
本研究の変遷は以下のようなものです.
- 中心脚伸縮にはタイミングベルトとテレスコピック機構を適用
- 脚リンク長を微調整し,機体フレームの軽量化,中心脚伸縮にラック&ピニオンを用い,自重でラッチが掛かる機構を搭載.
- 赤外線近距離センサの分解能を補う計測動作を追加.直線,まわり階段を確実に通過可能.
- 中間伸縮脚の足機構を追加し,まわり階段部でも十分な支持多角形を確保.
翌年度,更なる省自由度可を目指して,中心支持脚から伸縮自由度を廃し,回転自由度のみに変更したものの,狙いの動作を実現することが困難になり,2018年度までの成果で本研究を締めくくりました.
従って,この研究では,4脚は2自由度関節を持ち,体幹下部にはZ軸伸縮,ヨー軸旋回の2自由度機構が適していると考えています. |
|
掲載論文
加藤恵輔, 村尾彰太, 笠井航, "屋内回り階段を昇降可能な中心支持脚を有した
4 脚ロボットの開発 (中心支持脚の駆動系と足機構の設計)",
設計工学, 55, 3(2020), 177-190.
担当者 笠井(2014年度 修了),村尾(2017年度 修了) |
摘まみ上げ機能を実現する巻き取り機構を有した4指ハンド(改善)
巻き取りベルトは平ベルトを用いていましたが,特定の方向,特定の形状には効果があるものの,安定した接触状態を得ることができないことが多発しました.そこで,指先を球状にして,点接触ながらも必ず接触できるように変更するのですが,そのために丸ベルトを並べた構造を考案しました.
さらに,球がある軸で回転できるように軸を設け,その軸に対して半径の異なる溝を並べて球面になるように設計しています.また,この指ごとねじる方向に回転させることで,持ったものを手の中で回転させる操り動作機能を付与しました. |
 |
| 担当者 木幡(2017年度 修了) |
非円形プーリと干渉駆動による可変型重力補償機構を有するロボットアーム
定荷重ばねを利用した重力補償機構の設計理論を進展させるため,正確な補償トルクが得られるように工夫しましたが,誤差が若干残っていました.これを解消するため,補償量を厳密に計算して作ったプーリを用い,また複数のモータトルクが協調して有効に使える干渉駆動の原理を用いた駆動系を用いました.CNC加工機を用いれば汎用品でなくともオリジナルの物を作ることができることに着目した試作です.
主に原理の提案の研究ですが,これがうまくいけば,人間の傍,あるいは人間に装着した状態での利用にも応用できる可能性があります.
右図の通り,求めた形状データを基に製作したプーリが特徴的です.CNCフライスが容易に使えるようになってきたため,公差をある程度の範囲で許容できれば,このような形状のものを作ることができるので,新しい機能を試すことが可能となってきています. |

キーデバイスの非円形プーリ |
| 担当者 篠本(2018年度 修了) |
2019年度
対地適応機能を有した4脚歩行ロボットに用いる足機構
近年は,高度な制御を背景とした動的な動作の脚式ロボットが主流になり,足裏機構は簡素なもので十分となっています.しかしながら,家の中など運用する環境によっては,接地圧力を上げたくない場合もあり,また,ゆっくりと確実な動作が求められる場合には,静的な動作となりますが,このような場合,足による支持モーメントを確保する必要があります.足の裏を大きくするだけではなく,できるだけ外側でも十分な接地反力が出せることが重要です.わずかな凹凸があってもガタつくこともあり,柔らかい足裏にするとふらつくこともあるため,接地する部分は等しく接地反力を受ける装置が必要となります.足機構の確実な接地ができれば,歩行ロボットの制御は簡単になり,基本的な歩容(足の運び方)を生成できれば,姿勢制御の負担は軽減でき,自在な制御が可能となるのです.
このアイディアは簡単な機構で,20世紀末から温めていたのですが,実現する機会がなくて放置していたものをふと実現したものです. |
 |
| 担当者 傅(2020年度 修了) |
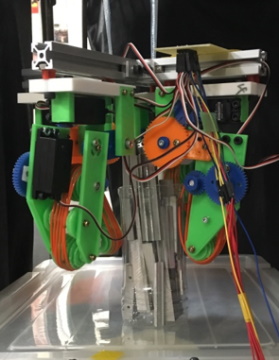
省自由度多関節駆動型能動義手
義手や義足をモータで動かす研究の歴史は古く,多様なものが作られているものの,あまり普及が進まず,専ら装飾義手と言われる,自然な造形であるが動かないものに留まっています.値段が高いことに加え,筋電や脳波などで動かすのに習熟が求められていることなども大きな課題となっています.
自由度(モータの数,関節の数)を工夫し,少ないモータで多くの関節を動かせる構造にすれば,操作が簡単になると考え,また,一定厚の材料を切り出して組み合わせれば,骨格となる構造が作れる設計法を検討したものがこの研究です.基本は開閉動作のみですが,使い方を工夫すれば単に把持するだけでなく,健常な側の手を組み合わせることで日常動作のいくつかを実行できるという特徴があります. |
 |
| 担当者 吉田(2021年度 修了) |
非円形プーリと干渉駆動による可変型重力補償機構を有するロボットアーム
自重だけではなく,持ったものの重量が分かればその分も補償してしまえば,さらに自在に動かすことができます.そのため,重力補償機構の補償量を調整できる機構を考案し開発しました.重力補償機構に干渉駆動を組み合わせ,不足しがちなモータトルクを補う駆動系を持ったアームです.
もちろん,補償するための調整のために動力を使うことに間違いありませんが,数秒で調整できますし,これを一旦補償してロックしてしまえば,モータは加減速のため,すなわち慣性力のために電力を消費するだけになるので,動作時間が長いほど無駄に消費する電力を抑えられるので,重力補償機構を可変式にした意義があると考えています. |
 |
| 担当者 篠本(2018年度 修了) 近藤(2017年度 修了) |
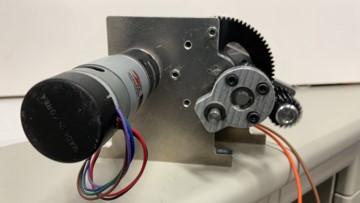
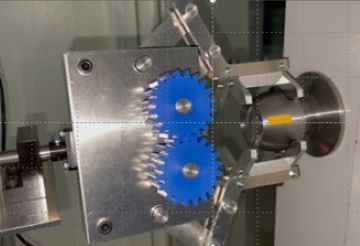
内歯歯車の歯数差と遊星歯車機構を用いた大減速比を実現する減速機構
| ロボットの世界には,ハーモニックドライブやRVと呼ばれる,大きな減速比が得られて,バックラッシが殆どない素敵な減速機構があります.これらは高額ではありますが,目的により,それでも十分な価値がある機構なのです.しかしながら,利用法や仕様を吟味し,よく管理された運用をしないと壊してしまう危険性が大きく,手軽に使えるようなものではありません.大きな減速比,それなりの少ないバックラッシ,頑丈または入手性の良い部品で構成という手軽な機構要素を開発したいというきっかけから開発した装置です.異なる歯数の2つの内歯歯車を用い,これらに別の歯車を同時に噛み合わせて転がせば,2つの内歯歯車に相対回転が発生するという原理です.この原理はハーモニックドライブに似ていますが,通常の歯車で構成している点がこれとは異なる特徴です. |
 |
登録特許
発明の名称:減速装置
発明者 :加藤恵輔、菊池快
出願人 :学校法人明治大学
整理番号 :2014-P21
登録番号 :第6418689号
登録日 :2018年10月19日
担当者 菊池(2016年度 修了) |
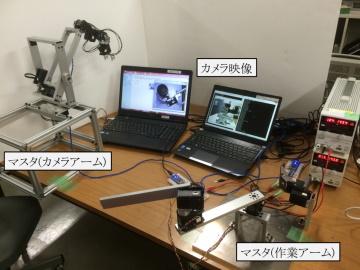
遠隔操作を行うためのハンドおよびアーム手首先端位置を分割した操作系
これまで,ロボットアームを作ってきましたが,これを遠隔操作するための方法について検討しました.力を計って操作系に帰還するなどの方法も有効ですが,簡単にできないかと考えた結果,手の動作を腕の動作を分け,左右の手に割り当てた操作系を開発しています.これが思いの外,操作が簡単と感じています.手先位置をきちんと合わせて,それからハンドを閉じる動作をするわけですが,これを分けることにより,ハンドを閉じるときに手先が動いてしまうようなもどかしさもなく,確実な操作が可能となります.
小学生から一般の人まで参加する展示会に展示したこともあり,実際に触って操作してもらいましたが,特に説明しなくても簡単に操作されていることからも有効性があるのではないかと考えています. |
 |
| 担当者 細野(2017年度 修了),篠本(2018年度 修了),横山(2013年度 修了) |
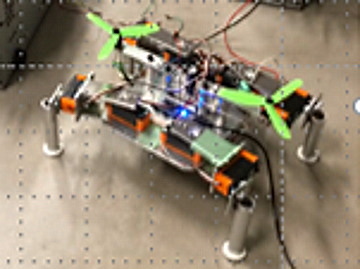
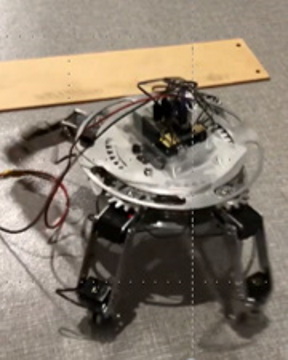
プロペラを用いた脚式ロボットの安定可制御系
| 有志学生らで,面白いロボットを作ろうと考えたものです.ドローンに興味があり,脚式ロボットに興味があり,マイコンでの制御に興味があり,といった背景から,脚式ロボットの姿勢制御にドローンを使ったらよいのではないかと考えたものです.4脚ロボットは通常,体幹姿勢を保ち,対地速度も一定いることから,多軸ジャイロと多軸加速度センサを組み合わせ,傾きを検出したらプロペラを回して姿勢制御します.脚式ロボットは歩容生成のみ行い,姿勢制御はプロペラで行います.脚の関節も最低限の数ですが,きちんと歩くことができました. |
 |
| 担当者 傅(2020年度 修了) 藤野(2019年度 修了) |
円筒座標配置の脚機構を有した4脚ロボットおよび足先車輪による滑走動作制御
| 簡単に歩け,これまでにない4脚ロボットを作ろうという目標から開発されたロボットです.ローラースケートの後退動作はちょうど蛇のくねり動作同様で,これを模したロボットは20世紀のうちに開発されていますので,全く異なる方式でできないかと考えたものです.4脚ロボットは脚構成を変えるだけで難易度が変わりますが,本機体では,脚の根元の関節を中心に合わせ,円筒座標系のように4脚を配置したものとなっています.意外とあるようでない構成で,各足に固定型車輪を付け,独自の歩容を開発しています. |
 |
| 担当者 傅(2020年度 修了) |
段差乗り上げを実現するオムニホイル型車輪機構
全方向移動車輛を構成するのに一般的となったオムニホイルですが,扱いの手軽さとは裏腹に段差を乗り越えにくいという弱点があります.周方向に配置された樽型の受動小車輪の直径が小さいことが原因です.これを大きくするにも限度があり,3つ並べるのが限度であるため,車輪直径に対して1/3程度までとなります.そこで,この車輪を大きくするための配置を検討した結果,複数の直径の小車輪を用意し,互いに入り込むような配置にすることで直径を1/2以上にすることができました.段に差し掛かった際,この車輪が掛かるように回転角を制御すれば車輪直径の1/6くらいは乗り上げられるようになっています.
配置には検討に検討を重ねていますが,大変複雑で,加工と組み立てが大変な車輪ですが,オムニホイルでも,段差に上がれる性能を得られる可能性を見出すことができました. |
 |
| 担当者 深澤(2018年度 卒業) |
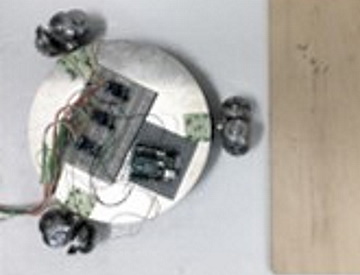
地震教育に用いるための高加速度を実現する全方向車両
地震動を再現するには,訓練用の起震車を用いて体験するか,加振機による正確な振動を用いて実験することが一般的ですが,その中間の手軽なものがこれまでありませんでした.ローラを用いた全方向車両に乗って体験するものがありますが,もう少し小型で一人でも搬送から準備までできるサイズでデモンストレーションができるものが必要ということで,全方向車両ながら強力な加速性能を得る方法を考えました.オムニホイルの場合,進行方向に対して車体側方の車輪が主に駆動力を発生しますが,慣性力によって荷重中心がずれてしまうと駆動力が伝えられず空転し,必要な加速度を得ることが困難なのです.そこで,車輪の配置を周方向から放射方向に変更し,進行方向の後ろ側の車輪を有効に活用する方式を検討しました.このままでは,ヨー方向(回転方向)を支持できず,動かしている間に方向が変わるので,捻じれ放射という配置にして,主に並進方向に駆動力を発生し,回転方向にも修正ができるように工夫しています.
オムニホイル外周の小車輪がちょうど爪のように路面に喰い込んで回るため,高トルクのモータと組み合わせ,高加速度を実現しました.仮に滑っても制御が有効に掛かっていれば振動動作を維持することができます. |
 |
掲載論文
加藤恵輔, 広瀬茂男, 吉田稔. "捻じれ放射配置オムニホイルによる全方向移動機構を用いた可搬型地震動シミュレータ-高加速度を実現する駆動機構-" 日本地震工学会論文集 19.7(2019), 56-66. |
全方向車両を用いた加振台を操作するための自己位置推定と操作誤差補正制御
全方向車両を遠隔操縦で動かすのは意外と難しく,まっすぐ前後に振動させているつもりでも,横に移動したり,中心から外れたりするなど意に反した挙動となります.車体のスリップも原因ですが,意図しない不正確な操作も原因となるため,これを修正するため,画像処理を用いた,自己位置推定,位置修正のための制御,操作意図認識などの機能を試みました.操作レバーを前後に振っているだけでも,操作が不正確であれば,だんだんとドリフトしていくことになるので,中心位置に戻す制御を加えながら操作することで,先の地震動を操作系で生成し,全方向車両を動かすことでデモンストレーションを行う方法について取り組みました.
小学生から一般の人まで参加する展示会に展示したこともあり,遊び感覚で実際に操作してもらいましたが,簡単に操作されていることからも有効性があるのではないかと考えています. |
 |
| 担当者 山路(2016年度 卒業) |
2020年度
ご存じSARS-CoV-2の問題があり,春学期は開始が延期となり,中盤はオンラインのみの活動により,構想検討と設計の一部,予備解析の一部程度しかできず,夏休み~秋学期は,人数を制限した活動となり,冬からまた人数制限が厳格化するなど,多難な一年でしたが,その中でも以下のような実験機を何とか開発することができました.
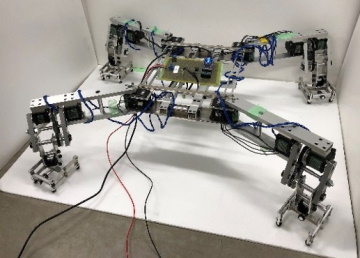
爬虫類型・哺乳類型に変形可能な4脚歩行ロボット
4脚ロボットの形態により移動性能・特性が変わります.爬虫類型は低い重心で安定しており,万一転倒しても胴体が路面に接触するだけで済みます.哺乳類型は足の長さを歩幅に反映できるため移動速度を上げられ,また,跨ぎ越えできる高さを大きくできるという特徴があります.脚は最低3関節あれば動作可能ですが,軸の方向が変わるため,これを切り替えるための機構を追加しています.このような機構構成を持った脚式ロボットは存在しないため,提案したというのが本研究です.
現在,本機体の後継機を開発中であり,2023年度に報告予定です. |
装置全体が完成したら公開します.
現在改良機開発中. |
| 担当者 別所(2021年度 修了) |
段差乗り上げを実現するオムニホイルおよび全方向車両
| すでに開発した新しいオムニホイルは乗り越え能力を上げることができたものの,構造が複雑であり,車輪の回転角によっては乗り上げ性能が変化するという問題がありました.乗り上げ性能を維持しながら,もっと簡潔なものができないかと検討し,リング状の小車輪を組み合わせ,捻じれ放射配置にした結果,車輪直径の1/2を実現し,通常のオムニホイルよりも高い段を乗り上げられます.また,有限個のリングが爪のように引っ掛かって乗り上げられるため,車輪直径の1/3を超える大きな段であっても乗り上がることが可能となりました. |
 |
| 担当者 斉藤(2021年度 修了) |
対地適応機能を有した4脚歩行ロボットに用いる足機構と凹凸への適応制御
| 4脚歩行ロボットの基本歩容を変えずに対地適応能力を向上するために,足部に設けられた4点の接地部に対し,対角を対として動作させ,凹凸に適応することを提案していますが,接地状態によって足裏機構が傾斜するため,胴体をまっすぐに保つための支持モーメントの特性に影響することがあります.胴体を動的に制御することに比して,さらに簡潔な制御ができないか検討し,足首2自由度のみをローカルに制御することを考えました.急峻な挙動も姿勢を崩す原因となるため,柔らかさを考慮した制御を行うため,機械的なインピーダンスを調整する制御を行っています. |
 |
| 担当者 傅(2020年度 修了) |
|
摘まみ上げ機能を実現する巻き取り機構と操り動作機能を有した4指ハンド
| これまでに,平ベルト型,有限回転角の並列丸ベルト,無限回転角の並列丸ベルトと改良を進めてきましたが,それぞれに課題がありました.小さいものを把持するのが不得意,摘まみ上げ機能に限度がある,摘まみ上げる際に対象物の姿勢が変化するなどの問題を抱えていたため,これらを解決すべく改良機を開発しました.基本構想は共通ですが,ベルトの等速性を得るための機構構成に変更しています.改善を繰り返してきた機体ですが, |
 |
| 担当者 泉澤(2020年度 修了) |
|
対地適応機能を向上するリンク機構および連結機構を有した車輪型連接ロボット
| 車輛を複数連結することで,相互に押す,引くことができ,荒れ地の移動性能を上げられると考えています.しかしながら,単に連結するだけでは,姿勢が崩れ,駆動力が有効に伝達しなくなってしまいます.駆動力の作用点に着目し,これを必要な場所に移すことで,姿勢を崩さず,有効な駆動力伝達の実現を目指します.また,凹凸に適応するための機構も同様で,作用点となる部分を調整することで,円滑な適応動作が可能となります. |
 |
| 担当者 藤野(2019年度 修了) |
|
2021年度
2021年度はSARS-CoV-2の影響もあり,試作を特徴とする研究室としては,影響が甚大かと思っていたのですが,思いの外,試作,実験を行うことができました.
4足歩行ロボットと対地適応性の向上を目指した足先機構に関する設計と制御
4足歩行ロボットの歴史は長く,昨今ではホッピング主体の完成度の高いロボットも開発されています.転んでも自力で起き上がる機能すらある魅力的なロボットですが,ここは少々趣向を変え,ゆっくり確実な動作とされる,静歩行,準動歩行を主体とした移動に着目しました.屋内や人間の傍で活動する場合,安全を期すればいつでも停止できる,あるいは見るからに安定していそうな動作であることが重要と考えています.開発したロボットの特徴は,狭隘な場所での移動性を考えて脚は哺乳類型に配置していることと,トロット歩容のような対角足の接地でもある程度の支持モーメントを生成できるような足機構を備えていることです.
用語
2脚ロボットと4足歩行ロボットでは若干定義が異なります.4足歩行ロボットについて説明します.
静歩行:支持多角形(接地している足で構成される多角形)内に重心,CP(荷物重中心),ZMP(Zero
Moment Point)が存在し,ある瞬間に動作を止めてもロボットは転倒しない状態となることが特徴です.
準動歩行:歩行サイクル(歩容と呼ばれる)の中で静歩行の時間と動歩行の時間が混在するような移動.対角の2脚を交互に接地する,あるいは駱駝のように左右2脚を組とした歩行の場合,足裏が小さければ,動的なバランスを取らないと転倒します.
動歩行:接地した足の移動面からの反力と機体の慣性力が釣り合っていることで,転倒しない状態を継続できる状態です.走行のように1足も接地していない状態がある場合,次の接地時にバランスを取ることができる状態で移動を継続できます.ある瞬間に動作を止めればロボットは転倒するので,止まる際にも,遷移していくような動作制御が求められます. |
 |
| 担当者 傅(2020年度 修了) |
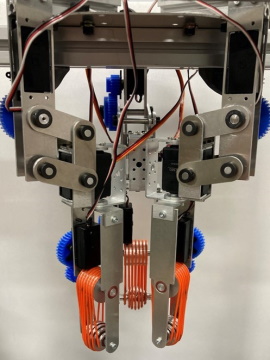
摘まみ上げ機能を実現する巻き取り機構と操り動作機能を有した4指ハンドの改良した3指ハンド
ロボットハンドの研究は現在も盛んに行われており,人間の手のような構造のものと全く異なる動作原理によるものがあります.対象物の摘まみ上げ,把持には指の構造が確かに有効であるが,対象物の形状や柔らかさなどを的確に理解しなければならず,高度な認識と制御を必要とします.特に摘まみ上げ動作を簡潔にできないか考えた結果,指にベルト状の機構要素を配置することで,タオルのような柔らかいもの,紙のような薄いものに対して有効であろうと考えました.ベルト部形状に関しては,以下のような変更を繰り返してきました.
- 2指の対向する平ベルト,指の根元の回転支持により開閉.
- 3指の球面配置の丸ベルト(有限動作範囲,各指回転可能),指の根元の回転支持により開閉.
- 3指の球面配置の丸ベルト(無限回転),指の根元の回転支持により開閉.
- 3指の球面配置の丸ベルト(無限回転,周速等速化,各指回転可能),開閉動作は平行リンク機構により並進的な動作.
3指であっても各指が回転できるため,ある程度対向したのと同様な状態にできるため,紙を摘まみ上げることも可能でした.また,開閉動作を並進としたため,ベルトで摘まみ上げることができれば,指の開閉を行わなくても把持に移行することが可能となることが特徴です.
|
 |
| 担当者 泉澤(2020年度 修了) |
夜光雲観測のためのカメラ雲台ジンバル機構の設計と制御,観測気球係留索巻き取り装置の開発
夜光雲は高緯度の高層に発生する氷の粒にて光が拡散する現象で,通年観測されるものではなく,春・秋に観測され易いとされています.近年,中緯度帯でも観測されるようになってきており,日本でも北海道北部でも観測できるようになってきています.
観測されるようになってきたのか,元々観測されるものが観測できていなかったのか,によってこの現象の解釈が大きく変わります.北海道が梅雨のために観測しにくかったのではないかという仮説を解明するため,低層雲より高高度で撮影できる手段を開発することがこの研究の発端です.ラジオゾンデに使われるようなヘリウムガス気球にカメラを懸垂させる構造となっており,これを係留索につなぎます.
夜間に風の影響を受けないようカメラを常に特定の方向に向けて安定化させるための制御を行うことと,係留索に過剰な負担が掛からないよう制御を行うことが,この研究での技術的な課題です. |
 |
| 担当者 別所(2021年度 修了),守谷(2020年度 卒業) |
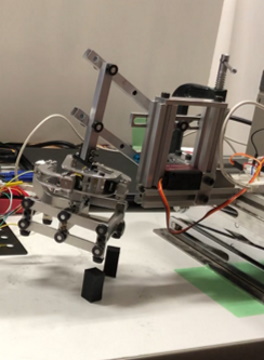
歩行時の下肢動作軌道の解析とこれを実現するための装置の検討
| 人間の下肢の動作は思いの外,複雑でありロボットのような規則的な軌道とはかなり異なるものです.機械によって反復的な動作を人間に加える場合,単純な機構では関節や筋肉に負担を掛けることとなってしまいます.そこで,制御を掛けて,複雑な軌道を再現できることが求められる上,強力であること,ある程度の可逆駆動性を有していることなど考慮すべき点があります.しかも地面に当たっているのと同様な感触とするには,可逆駆動性は少ない方が良いなども難しい点です.そこで,上下方向にはモータの角度次第で正弦波状の変位を生成する機構を利用し,接地時には可逆駆動性を減少させ,遊脚時には可逆駆動性を大きく利用できる特性の減速機を利用します. |
 |
| 担当者 伊藤(2021年度 修了) |
段差乗り越えを目指した転動動作を行う放射配置された4足歩行機械
| 脚式ロボット新たな構成法を検討したいというが本研究の発端です.脚は不整地移動に適していて,脚は転倒することも往々にして起こり得ます.高度な制御によって転倒しない,あるいは起き上がる制御機能を用いるのも有効で真っ当な考え方ですが,これに対して,転んでいる状態がない,もしくは転びながら移動するという移動形態を実現すると球状の機体にあるのではないかと考えてみました.常に転がっているのは非効率かつ経路が不安定になるので,正四面体の頂点にオムニホイルを取り付けて全方向車輛として平地移動を行い,段差にて脚が出てきて乗り上げるような動作を行うという形態のロボットを開発しました.試作機で車輪はありませんが,確かに段差を転動して乗り上げることができました. |
 |
| 担当者 速水(2020年度 卒業) |
2022年度
2022年度もSARS-CoV-2の影響もあり,試作を特徴とする研究室としては,2021年度同様に試作,実験を行うことができ,ほぼ通常の活動ができるようになりました.
摘まみ上げ機能を実現する巻き取り機構と操り動作機能を有した4指ハンドの改良した3指ハンドをさらに改良した4指ハンド
ロボットハンドの研究は常に盛んに行われており,人間の手のような構造のものと全く異なる動作原理によるものがあります.対象物の摘まみ上げ,把持には指の構造が確かに有効となるが,対象物の形状や柔らかさなどを的確に理解しなければならず,画像認識など高度な認識と制御を必要とします.特に摘まみ上げ動作を簡潔にできないか考えた結果,指にベルト状の機構要素を配置することで,タオルのような柔らかいもの,紙のような薄いものに対して有効であろうと考えました.ベルト部形状に関しては,以下のような変更を繰り返してきました.
- 2指の対向する平ベルト,指の根元の回転支持により開閉.
- 3指の球面配置の丸ベルト(有限動作範囲,各指回転可能),指の根元の回転支持により開閉.
- 3指の球面配置の丸ベルト(無限回転),指の根元の回転支持により開閉.
- 3指の球面配置の丸ベルト(無限回転,周速等速化,各指回転可能),開閉動作は平行リンク機構により並進的な動作.
- 4指の球面配置の丸ベルト(無限回転,周速等速化,各指回転可能,ベルト配置改善,ベルト張力適正化),開閉動作は平行リンク機構により並進的な動作.平行リンク機構の初期姿勢変更
4指であれば,確実に指が対向し,接触力ベクトルを同一線上に配置できるため,紙を摘まみ上げることも可能でした.また,開閉動作を並進としたため,ベルトで摘まみ上げることができれば,指の開閉を行わなくても把持に移行することが可能となることが特徴です.さらに,指の側面でも把持できるようにしたため,操り動作の安定性が向上しました. |
 |
| 担当者 渡辺(2021年度 修了) |
段差乗り上げを実現する捻れ放射配置型小車輪を有するオムニホイル型車輪機構
全方向移動車輛を構成するのに一般的となったオムニホイルですが,扱いの手軽さとは裏腹に段差を乗り越えにくいという弱点があります.周方向に配置された樽型の受動小車輪の直径が小さいことが原因です.これを大きくするにも限度があり,3つ並べるのが限度であるため,車輪直径に対して大きくても1/3程度までとなります.そこで,この車輪を大きくするための配置を検討した結果,小車輪を互いに入り込むような捻れ放射配置にすることで直径を1/2以上にすることができました.段に差し掛かった際,この車輪が掛かるように回転角を制御すれば車輪直径の1/4くらいは乗り上げられるようになっています.
設計,加工を簡素化することを狙いとしていましたが,多角形接地となる問題があることから,さらに内側に通常のオムニホイルを配置し,平地はこれを用いて円滑な動作を行い,段差に差し掛かったら上記の捻れ配置小車輪を持ったオムニホイルを段差乗り上げに活用しています. |
 |
| 担当者 斉藤(2021年度 修了) |
輝点検出を画像処理により行うマルチコプタの離発着動作に恭順する動作制御
マルチコプタは自在な運動ができ,環境認識性能次第で狭隘な空間にも進入できる利点があるものの,離発着には水平であることが求められます.また,実用,商用稼働のためには人間との距離を確保しておくこと望ましく,マルチコプタから受け取った荷物を移動型ロボットが運ぶことが現実的と考えています.マルチコプタが離発着しやすくできるよう,移動ロボット側でもこれに恭順できる機能を実現しようと考え,マルチコプタとの相対位置関係を認識できるような画像処理系を実装しました.
簡潔なシステムを目指し,カメラは単眼としており,マルチコプタの被認識性を向上する為,輝点を用いたマーカを搭載しています.
基本原理を検証するため,全方向移動ロボットを用いていますが,他の形式を用いた方法も模索していく予定です. |
 |
| 担当者 岡本(2020年度 修了),近藤(2018年度 修了) |
段差乗り上げを実現する前輪跳ね上げ機構を有するオムニホイル型移動ロボット
全方向移動車輛の構成に一般的なオムニホイルですが,段差を乗り越えにくいという弱点があります.周方向に配置された樽型の受動小車輪の直径が小さいことが原因で,これを大きくするにも限度があり,3つ並べるのが限度であるため,車輪直径に対して大きくても1/3程度までとなります.そこで,段差に侵入する前輪を跳ね上げて乗り上げる方式を検討し,能動自由度を付与した結果,車輪直径の1/4くらいは乗り上げられるようになっています.
比較的,設計を簡素化できることを狙いとしていましたが,簡潔な機体構成の割に乗り上げ性能を確保できたと考えています. |
 |
| 担当者 増田(2021年度 卒業 2023年度 修了) |
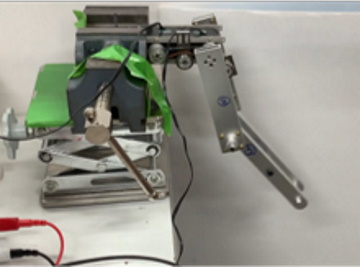
ドアノブを把持可能なハンド機構
| 屋内を自在に移動するロボットにとって,ドアは難所のひとつです.建物自体をインテリジェント・ビル化して,ドアを自動開閉できるようにするなど,ロボットと連携できるようにする方法もありますが,既存の建物の場合,対応する改造等が難しい場合もあります.そこで,ドアノブを把持できるようなハンド機構を考案し,握って捻る動作ができる機構を開発しました.回転軸とドアノブ中心が若干合っていなくても適応できるような機構要素を入れるような工夫を施し,玉座型,レバー型のドアノブで実験を行いました. |
 |
| 担当者 川島(2021年度 卒業 2023年度 修了) |
4足と2足2腕モードを切り替える移動・作業ロボット
4足歩行ロボットの研究の歴史は長く,多様な試みがなされてきました.対地適応性の高さ,足を手としても利用できる特性が着目されており,運搬作業を行うための機体形態を検討しました.荷物を運ぶ際,車輪型の移動機構からの積み降ろし作業が必要となるため,この作業に求められる機能を検討するための機体開発を行いました.低地から一定の高さに対象物を移動させられることを目指した機体となっており,形状的な特徴,設計からの特徴は次のようなものがあります.
- 前後を異構造とした機体で,前足を段に近付け,後足を荷物の把持,持ち上げ動作に利用します.
- 前足は段にできる限り近付けられるような配置とし,足裏を大きくしておき,確実な支持モーメントを得られるようにします.
- 後足は荷物を把持し,体幹を逆立ちのように立てて,高所に荷物を移動します.
- 胴体には捻れおよびピッチの自由度を有しており,後足で対象物を把持し,体幹を捻って段の上に対象物をおくような動作を行います.
4の機構は2自由度であるが,大きなトルクが働くところであるため,干渉駆動構成としてモータ動力を有効に利用できるように工夫している. |
 |
| 担当者 高橋(2021年度 卒業 2023年度 修了) |
ピッチ軸,ロール軸の2軸で適応可能な交叉リンク機構を有した装輪型移動ロボット
斜面に装輪型移動ロボットを安定させて移動するには,可能な限り,動的なバランスを必要としない低速な移動が適していると考え,また,慣性力に頼らない移動には低出力のモータによる移動となるため,斜面を最大傾斜線方向だけでなく,等高線方向にも移動できる必要があると考えました.従って,2軸で適応できる必要があり,しかも重心が斜面の谷側に移動しないよう工夫しなければならないため,交叉平行リンクを用いました.これにより,ピッチ軸,ロール軸の回転中心を地表面に合わせることができるため,安定余裕が著しく減少する問題が回避できると考えています.
マルチコプタとの協調作業にも適している形態の移動ロボットと考えております. |
 |
| 担当者 岡本(2020年度 修了) |
ピッチ軸を地表面まで下げた6輪型移動ロボット
| 惑星探査車輛など軽量で優れた対地適応機能を有した移動ロボットには,ロッカー・ボギー機構が用いられます.前後2輪を梁で結んだボギー機構に対し,さらに1輪を梁で結んだロッカー機構で構成され,これを左右に配置した車体となっています.さらに特性改善ができないかと考え,特に前輪が移動面の凸地形,特に段差に差し掛かったときに車輪ごと後ろに押し戻される挙動となるので,これを解決するために,交叉配置平行リンクを用いることとしました.車軸よりも低い位置にピッチ軸回転中心が配置されるため,段に差し掛かって前輪が押し戻されると,ボギー機構を介して前輪が上がる方向に動作するため,より容易に乗り上げられるようになることを期待した機構です. |
 |
| 担当者 泰(2021年度 卒業 2023年度 修了) |
2023年度
2022年度,まだまだ制限のある中で尽力した学生も数多く,前半から学会にて報告致しました.
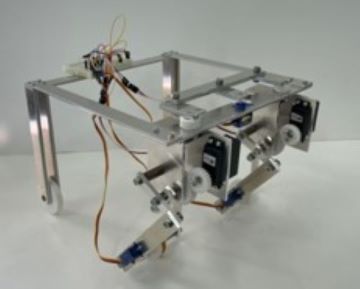
1モータで脚ロボットの足先軌道を生成するリンク機構
多脚ロボットは,自在な移動性能を持ち,段差など不連続面でも移動できる反面,制御には一定の技術水準が要求され,必ずしも簡便な利用ができるとも言い難い面があります.機構の工夫で足を上げながら前進する軌道を生成できないか検討し,4節リンク機構を組み合わせたものを発案しました.足先機構を生成する機構はチェビシェフリンク機構やテオヤンセンの機構が有名ですが,接地時には足先高さが下がっているため,遊脚が前に出たときそのまま下ろせる機構を検討しています.原理の検証機として前2足のみ試作し,後ろは車輪で構成された試作機を開発し実験を行いました.
原理検証のための機体でしたが,一定の段差を認識なし,制御なしで乗り上げることができ,本研究のコンセプト通りの動作が実現できました. |
 |
| 担当者 吉澤(2022年度 卒業) |
球面リンク機構・交叉配置平行リンク機構を用いた連結型装輪ロボット
連結型の移動ロボットは,脚,車輪,クローラとも優れた移動性能が期待できます.移動面の状態によっては,後ろの移動ユニットから押された前側のユニットが移動面に引っ掛かって姿勢が崩れることも起こります.この原因を考えたところ,連結機構の高さ,即ち作用点の高さではないかと考えました.連結機構を下げてしまうと移動面との間隔が少なくなるので,連結機構を下げたかのように機能する機構がないかを考え,球面リンク機構の利用を検討しました.これにより,機構の高さを保ったまま,作用点を任意の高さまで下げることができ,車輪の接地点まで下げれば,後ろの車体は前の車体の姿勢を崩すことなく力を伝えられます.
細かな凹凸についても,各車体ユニットにある4輪の動作が重要と考え,前輪が段差や突起に対して上がりやすくなるよう前後輪を結ぶリンク機構の回転中心高さを下げる必要があると考え,交叉配置された平行リンクを用いて回転中心を調整し,滑らかに段差乗り上げできるような機構を実現しています. |
 |
| 担当者 伊藤(2022年度 修了) |
全方向移動型ロボットを用いたリハビリテーションを行う装置
脳卒中など麻痺に繋がる危険のある手術後は,できるだけ早くリハビリテーションを行う必要があると言われています.麻痺からの回復と拘縮とよばれる筋肉や関節が固まることを避けることが目標となります.畳2~3畳の大型で高度な機能の装置が開発される一方,現場では簡潔な器具が利用されています.理学療法士,作業療法士の方々の負担が大きく,また,患者本人のモチベーションを維持する必要など,多くの課題があります.現場で利用できる比較的簡潔な装置を目指しながら,自動化,あるいはアシストなど理学療法士,作業療法士の方々がより患者本人の精神的な支援と動機の維持に携われるような装置の開発に取り組んでいます.
脚軌道は思いの外複雑であるため,自在に動くことができるよう,全方向車輪を利用しました.車軸を揃えて装置の幅を抑えるるため,メカナムホイールを用いた低床の装置を設計しています. |
 |
| 担当者 山田(2022年度 卒業 2024年度 修了) |
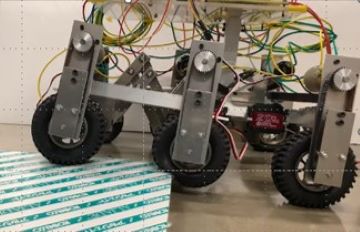
斜面に適応し沈み込みを抑制する多輪配置型装輪移動ロボット
クローラは建設機械や農業機械に用いられ,優れた対地適応性があります.乾いた土,砂,礫など崩れやすい移動面ではクローラの利用が効果的です.しかしながら,クローラは履帯とスプロケットの間に異物が挟まることもあり,製品も限定的で任意のものを利用するには費用を含め制約があるのも実情です.そこで本研究では,複数車輪列を並べることを検討し,斜面角度に合わせて広く接地することと,沈み込みに対して複数の車輪で支持して,駆動力と支持力を確保することを目指した機構を発案しました.
車輪はすべて同速度で連動し,各車輪とも操舵でき,ピッチ方向に適応できるような構造となっています.砂利を積み上げた安息角(32°)の坂を安定して走行しています.
駆動のパワーと慣性力に依存して駆け登るような走行ではなく,低速で確実な接地を維持したままの走行・挙動が特徴です |
 |
| 担当者 吉村(2022年度 修了) |
脚・車輪変形移動ロボット
歩行ロボットを議論する際,エネルギ効率が話題に上ります.機体の支持と移動のための駆動にアクチュエータを用いるため,平地の一定速度の移動でも余計にエネルギ消費が発生します.脚・車輪ハイブリッド移動ロボットが発案されており,脚に駆動された車輪を持つもの,受動車輪を持ち脚動作で推進力を生成するものなどが研究されています.脚移動は,複雑な地形,幅の狭い通路などで利用すると設定し,それ以外は車輪で移動するという運用法がエネルギ効率の面で有効であると考えました.
車輪で移動する際は,脚がエネルギ消費をしないようにするため,折り畳まれた膝や足首は突起と穴によって,関節駆動をしなくても姿勢を維持できるような機構を組み込んでいます.
車輪機構は,2のモータによる差動駆動となっており,歩行時は重量の影響を低減するため,跳ね上げて体幹に近付け,重心を高く保って固有振動数を下げるような配置としています. |
 |
| 担当者 南(2022年度 卒業) |
西之島の鳥類・節足動物観察のためのローバの開発
| 2023年9月の調査に向けて短期集中で取り組みました.プロジェクトをご覧下さい. |
|
| 担当者 高橋,猪股,研究室有志 |
2024年度
2023年度に続き,SARS-COV-2の影響,制限もなくなり,まるで靄,霧,霞が晴れたかのような状態となりました.意欲的に取り組む学生が多かったので成果として出していくことができました.元々メカトロニクス関係の工作が好きだったという素地を持たない学生もアイディアから形にしていくこと,そのための数式モデルを作っていくことなど丁寧に取り組んでいたと考えています.
ドアを開閉するハンド・アーム・全方向移動機構から成るロボット
ロボットフレンドリーという言葉があり,建物にディバイス,機能を追加してロボットが行動しやすくする工夫をしたり,ロボットと協調,協働できるようにする考えもあり,また,バリアフリーのように移動自体の障壁をなくす考えが浸透しているが,建物の駆体は数十年以上の寿命を持ち,一旦建造されると内装の工事も可能であるが,多くの費用が生じ決して容易とは言い難いと考えています.そこでロボットを工夫し,既存の建物設備でも移動して運用できる方法を考えました.
ハンドは,玉形のノブ,レバー型のノブの双方に対応でき,開閉するだけで掴むことが可能な機構となっています.
高い位置決め精度が要求されないハンド,軽量なアーム,多少の段差を移動できる全方向移動の車体,ドアを傷つけずに受け止められる車輪を覆うフェンダから構成されたロボットです.オムニホイル全方向移動車輛において,サイクロイド状の軌道を用いると段を乗り上げられるが,これをさらに拡張してフェンダでドアを引っ掛けて支えながら通過する方式としています.
人間がドアを足で引っ掛けるのは人によって嫌悪感を抱くかも知れませんが,移動面に触れていない柔らかい筐体部分がドアにあたるのであればあまり気にならないであろうという着想から考えたものです. |
.jpg) |
| 担当者 高橋(2023年度 修了) 川島(2023年度 修了) |
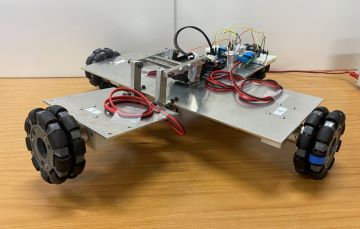
4輪メカナム+1輪オムニホイル構成の移動型ロボット
X-Yの並進移動,ヨー軸の旋回が可能で自在に走行できる移動ロボットは特に狭いところでの移動に適していますが,オムニホイル,メカナムホイルとも樽形のローラの直径が小さいため,一般に段差乗り上げが苦手とされています.先行研究にオムニホイルを9輪用いて段差に適応できる取り組みがあり,これをさらに簡潔にできないかと考え,考案したものとなっています.
これに対し,メカナム4輪を基本としてオムニ1輪を追加した機構としています.
メカナムホイル,オムニホイルともすべての車輪が接地していないとフリーホイルが空転して思い通りの走行ができないため,ロッカー・ボギー機構を構成し,ボギーにはメカナム2輪とオムニ1輪で三角形に配置し,ロッカーにはメカナム2輪を配置するが,ロール方向の自由度を付与して,ボギー機構に対して捻れて対応し,全輪が接地できる構成となっています.
段差に対しては,前輪2輪が接触すれば,残りの3輪の駆動力による押し付けにより乗り上げるように動作し,中央のオムニホイルは駆動方向の接地であるため,小車輪がむしろ引っ掛けるようにして登り,残りの2輪は段差に乗り上げた3輪により引き上げられるように動作します. |
 |
| 担当者 増田(2023年度 修了) |
ロッカー・ボギーの回転中心を下げた移動型ロボット
車輪の取り付けられたカンチレバーの端部の高さによって乗り上げ性能が変わると考え,これを低くすれば乗り上げやすく成るのではないかと考えたのが発端です.ボギー機構のピッチ軸高さが高いと前の車輪が段に差し掛かったとき,後ろに押される状態になり,引っ掛かるため,これを下げることにより,前の車輪が容易に上がり,段に乗り上げやすくなるのではないかと考えたものです.
ロッカーボギー機構の場合,回転軸を下げると,機構が移動面に近くなって干渉しやすくなるため,回転中心を機構構造から外に出す必要があります.そのために平行リンク機構を2組交叉するように取り付ければ回転中心は移動面に一致させることすら可能となります.
これをロッカー機構,ボギー機構それぞれに適用し,左右それぞれに配置して,ロッカー機構同士が差動的に動く車体を開発しました.
車輪は6輪とも操舵可能で,それぞれ駆動します.提案した方式で車輛を開発し,実験した結果,特に円滑な乗り上げができるようになったところが特徴的でした.乗り上げ時の前輪は荷重が少なくなることで上がりやすくなります.中輪,後輪はむしろ荷重が大きくなりますが,前輪,中輪まで乗り上げれば後輪を引きつけ,段差壁面に押し付けられるため,乗り上げることが可能となります. |
 |
| 担当者 泰(2023年度 修了) |
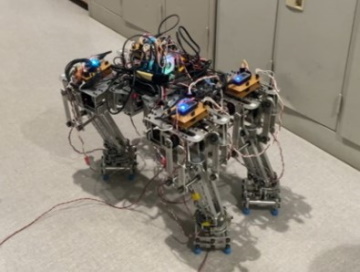
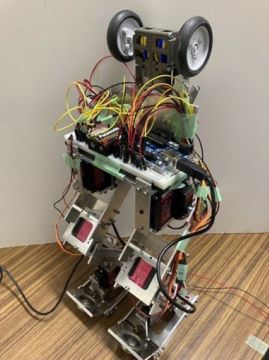
連動型体幹傾斜自由度を有したヒューマノイド上肢
ヒューマノイドに適用する5自由度の首関節機構
ヒューマノイドの開発・研究の歴史は長く,優れた機体が数多く開発されている.このような状況でヒューマノイドを開発する意義を見付けることは中々に難しいことであるが,従来のものとは異なる機体開発を試行したいという動機で開発しています.
開発したのは,頭部,固定の首,体幹,双腕,骨盤までで,手と脚,足はこれからという状態までの製作となりました.
特徴は,肩周辺と骨盤の結ぶロッドがあることで,簡単なパラレルリンク構造を有しています.体幹をロール方向に傾けていくと,肩も下がりますが,起こす方向に動作するよう調整して設計したものとなっています.少ない自由度で自然な動きを検討した結果の自由度構成となっています.
腕部は肩周辺にモータを配置し,4自由度を付けています.周囲環境への干渉を防止し,任意のカバーを取り付けられるよう,可能な限り腕部はフレームのみの構造とした結果です.
ヒューマノイドを人間とのインタラクションに用いる場合,また顔に付けたカメラを用いて周囲を認識したり対話する人間を認識するには首の自由度が重要と考えています.特に頭部より体幹が太くなる場合,カメラで下を覗き込む動作が必要となります.人間との対話の場合,首の動きでもある程度の視線を作ることができると考え,十分な自由度を持った首機構を開発しました.既に開発したヒューマノイドの首にスチュワートプラットフォーム型の首を置換しています.
人間の頭部を球として見たとき,決して回転中心は頭部の中心ではなく,後方にあるため顔の表面は大きく動きます.しかしながら,機構としては中心で支えた方がモータの消費電力が少なくできるのも確かであり,人間らしい動作を実現するため,提案した機構を用いています. |
.jpg) |
担当者 吉田(2021年度 修了)
担当者 河西(2023年度 修了) |
西之島の鳥類・節足動物観察のためのローバの開発
| 2024年9月の調査に向けて短期集中で取り組みました.プロジェクトをご覧下さい. |
|
| 担当者 中村,山田,研究室有志 |
2025年度
2023年度から続き,意欲的に取り組む学生が多かったので成果として出していくことができました.研究の方針が見えてくると,火が付いたかのように前進する学生が多く,限られた期間ながらも各自が成果を散らかすかのように出していったような年度だったと思います.
(公表され次第,記載します.)
(公表され次第,記載します.)
(公表され次第,記載します.)
(公表され次第,記載します.)
可変式重力補償機構
|
|
担当者 篠本(2016年度 修了)
担当者 李(2024年度 修了) |
以上は2025年3月での研究紹介ですが,論文掲載,学会にて報告次第,新たに追記していきます.
名前を掲載している研究は,学会発表,特許公開済みのものですが,それ以外にも学生の尽力の成果を出していく準備中のものもあります.